テインの新製品EDFC5の「躍度」制御が画期的! 試乗レポート(前編)〜説明会から凄かった!〜
2023/01/30 14:50
- CATEGORY : ニューパーツ
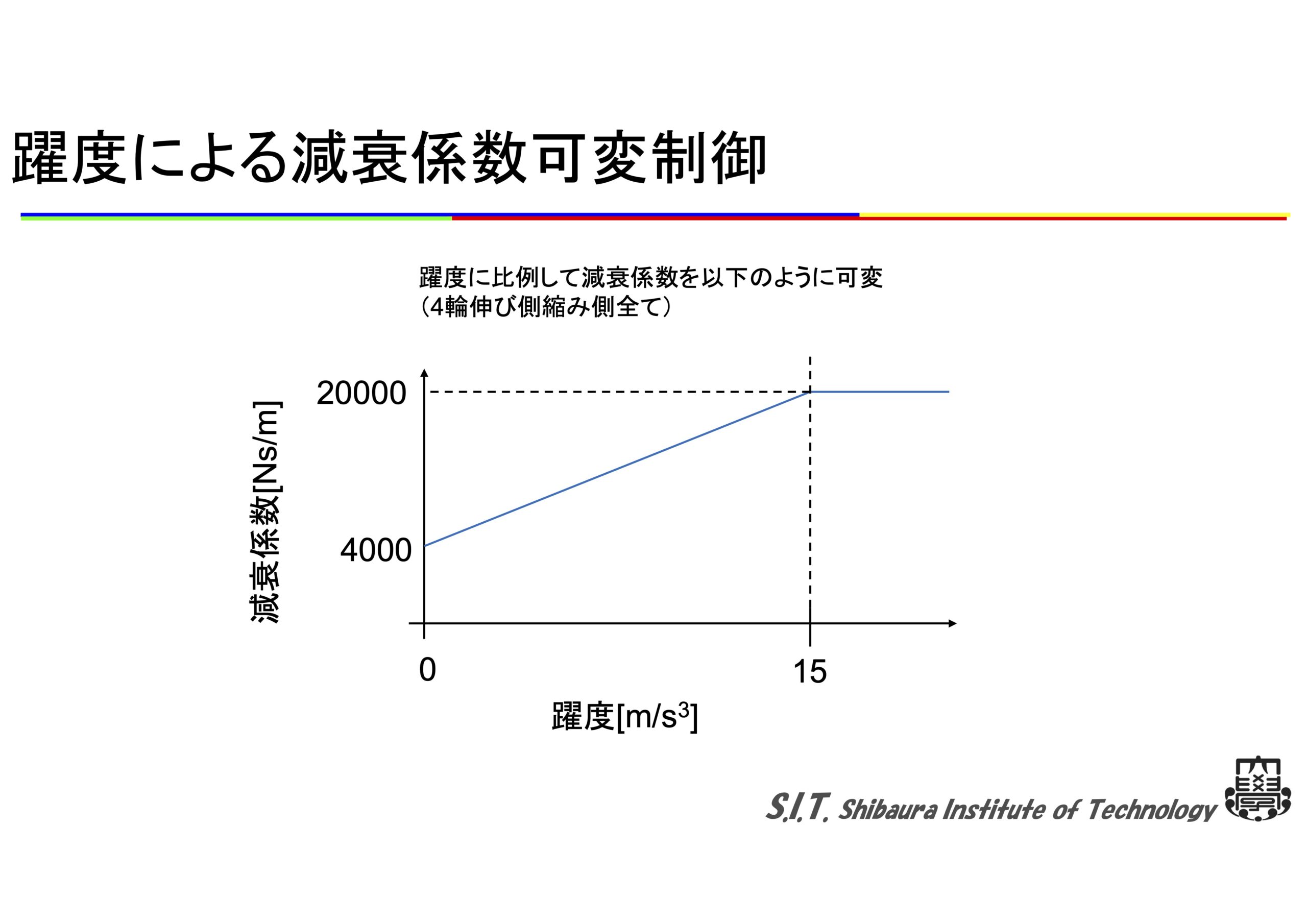
そこでこんなシミュレーションをしてみました。躍度に応じて、減衰力を変える。躍度が上がるにつれて、減衰力を高めていく。このシミュレーションでどうなったか? ここでは4輪すべて同じ減衰の制御です。
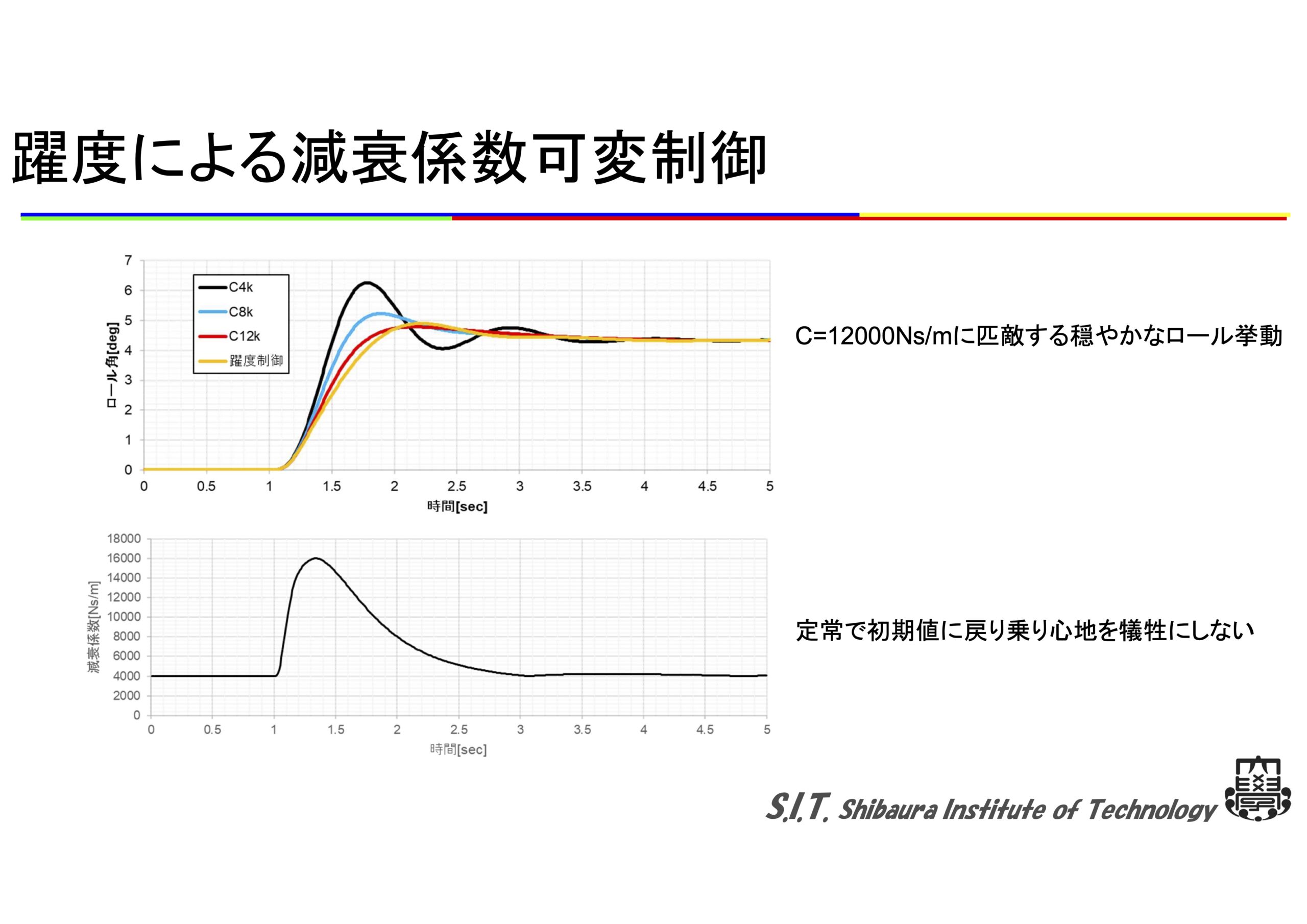
上のグラフの縦軸はロール角、横軸は時間になります。先ほどの減衰力を変えた4000(軟らかい)、8000,12000(硬いガチガチ)の減衰係数のグラフに加えて、躍度制御したグラフがオレンジです。
そうすると躍度制御でガチガチでとても乗れないような乗り心地を無視した12000に肉薄できるような、穏やかなロール挙動の波形が得られることがわかります。
しかも、下のグラフはそのシミュレーションでの減衰の変化になりますが、旋回の過渡のときだけ減衰を高めてやる、定常域では初期値に戻り、乗り心地を犠牲にしない。
そういう制御が躍度を使えばできるのです。
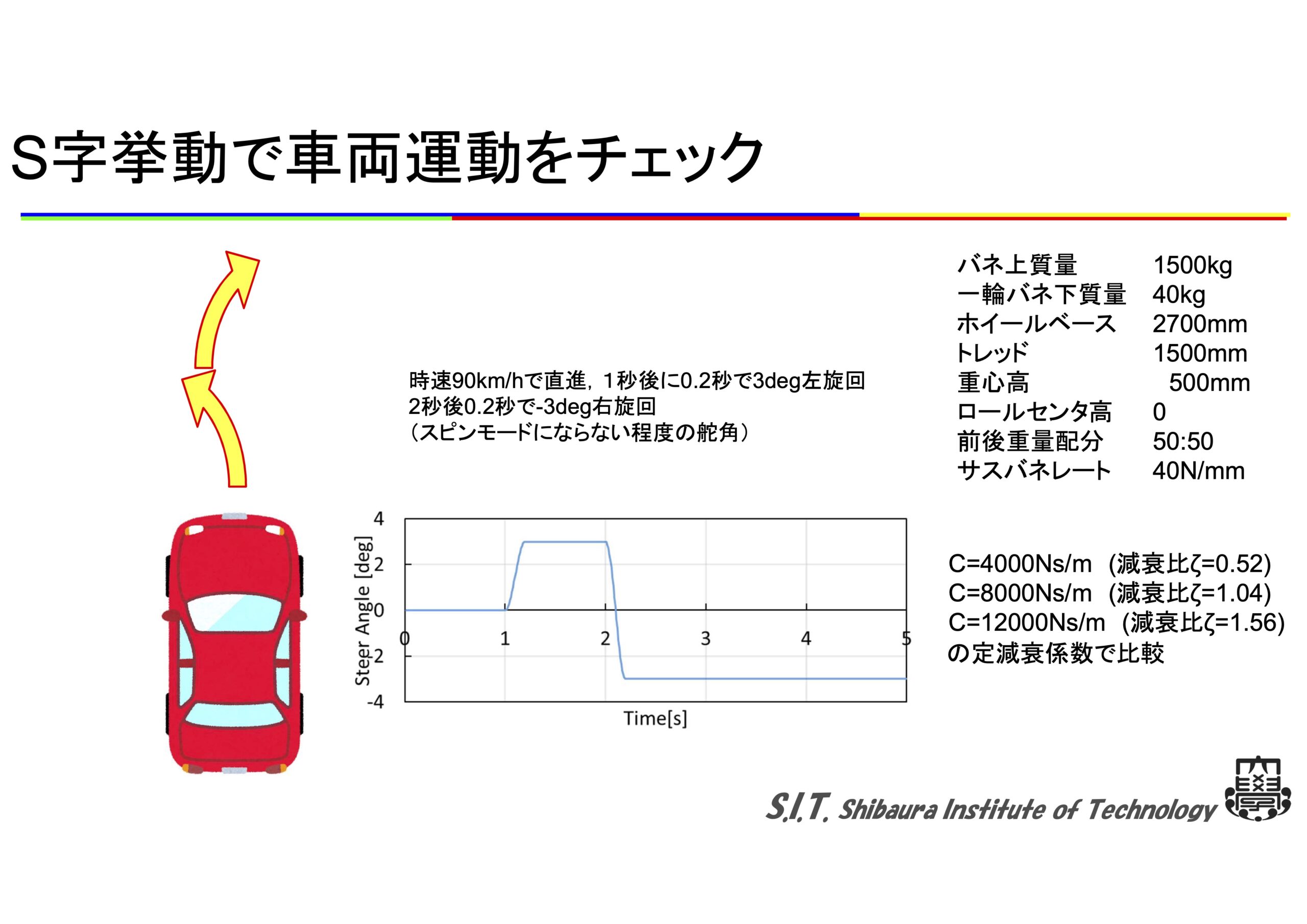
今度は別のシミュレーションをしてみます。先ほどまでは左旋回だけだったのが、今度はS時旋回です。
同じように90km/hで直進。
1秒後に0.2秒で左に舵角を3度与えて左旋回に。
その1秒後に0.2秒で逆の右に舵角が3度になるよう切り返す。
これを減衰力がさきほど同様の3パターンで行います。
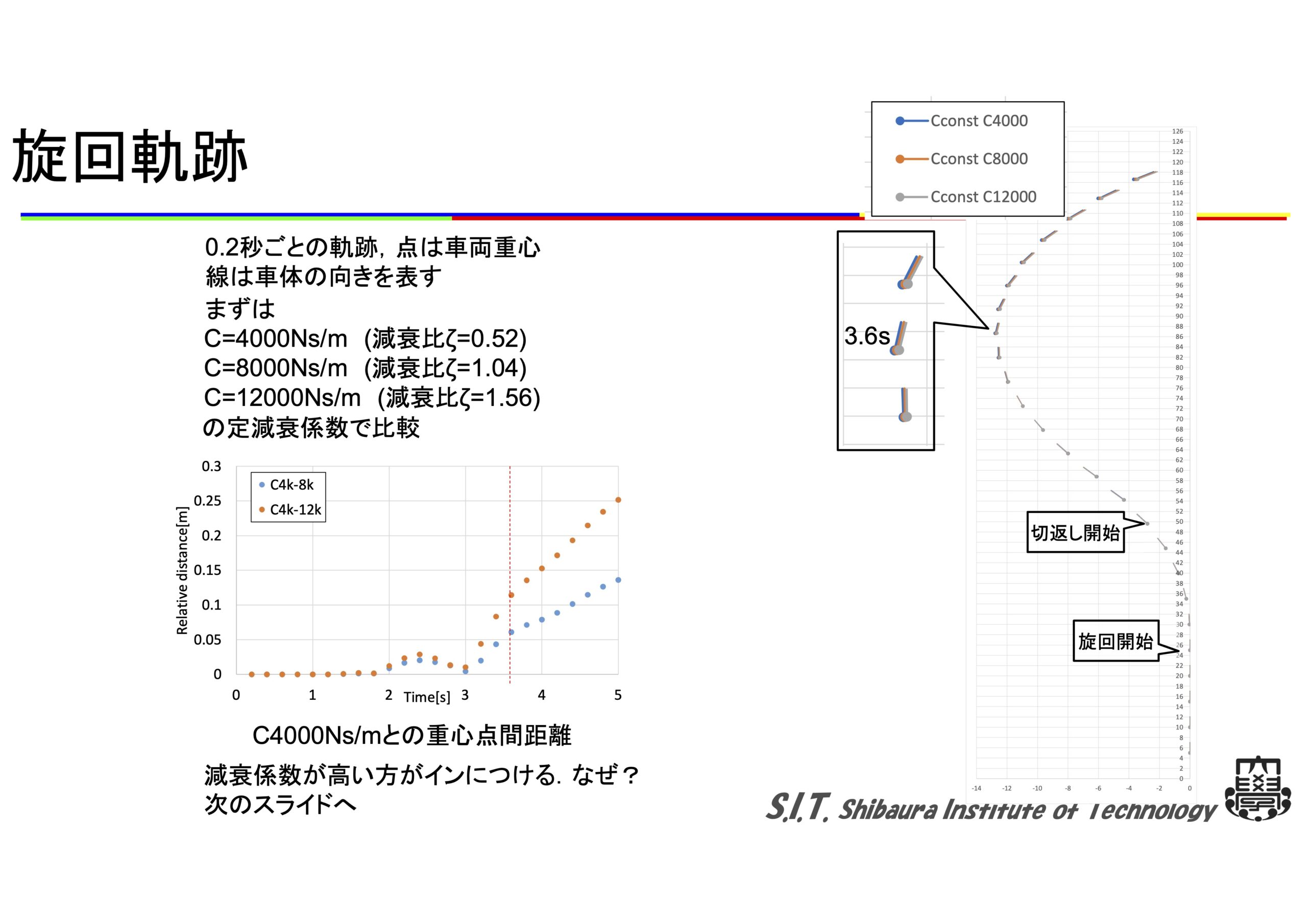
右側が旋回の軌跡です。これを見ていくと、減衰の違いにより辿っていく軌跡が若干変わります。
右の拡大画像を見ると、減衰力が高い方が、軌跡が内側に入っていくんですね。
左のグラフだと、C4000(軟らかい)との重心点間距離から8000、12000と硬くしていったほうがインにつける。それはどれくらいか? このグラフからだと10cmくらいか? それでも、減衰係数が高いほうがインにつける。なぜか?次スライドへ。