

テインの新製品EDFC5の「躍度」制御が画期的! 試乗レポート(前編)〜説明会から凄かった!〜
2023/01/30 14:50
- CATEGORY : ニューパーツ
「躍度」制御は旋回荷重のオーバーシュートを抑制し
収束を早める自動調整機能

ここからは、芝浦工業大学 システム理工学部 機械制御システム学科 渡邉 大教授
による「躍度」制御の説明を再現するコーナーだ。
躍度の計算で、高価なヨーレートセンサーが必要ない?
渡邉教授
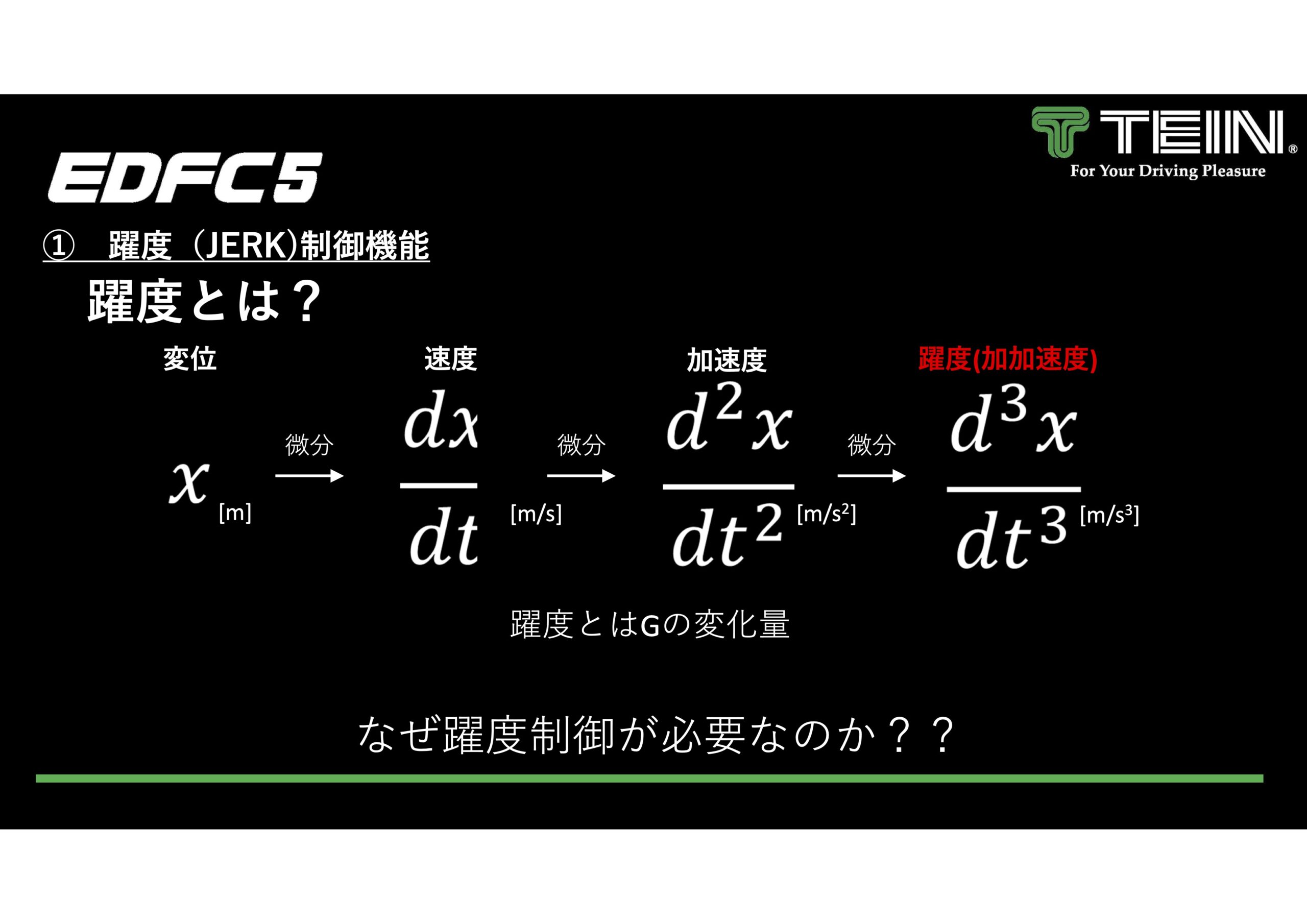
まず、躍度とは何か? について説明しましょう。
「変位(距離)」を「時間」で微分すると「速度」になります。
「速度」をさらに「時間」で微分すると「加速度」が出てきますね。
「躍度」というのは、「加速度」をさらに「時間」で微分した物理量で、「Gの変化量」と捉えてもらえばいいでしょう。
ではなぜ、躍度制御が必要なのか?
その前に旋回挙動を考えてみましょう。
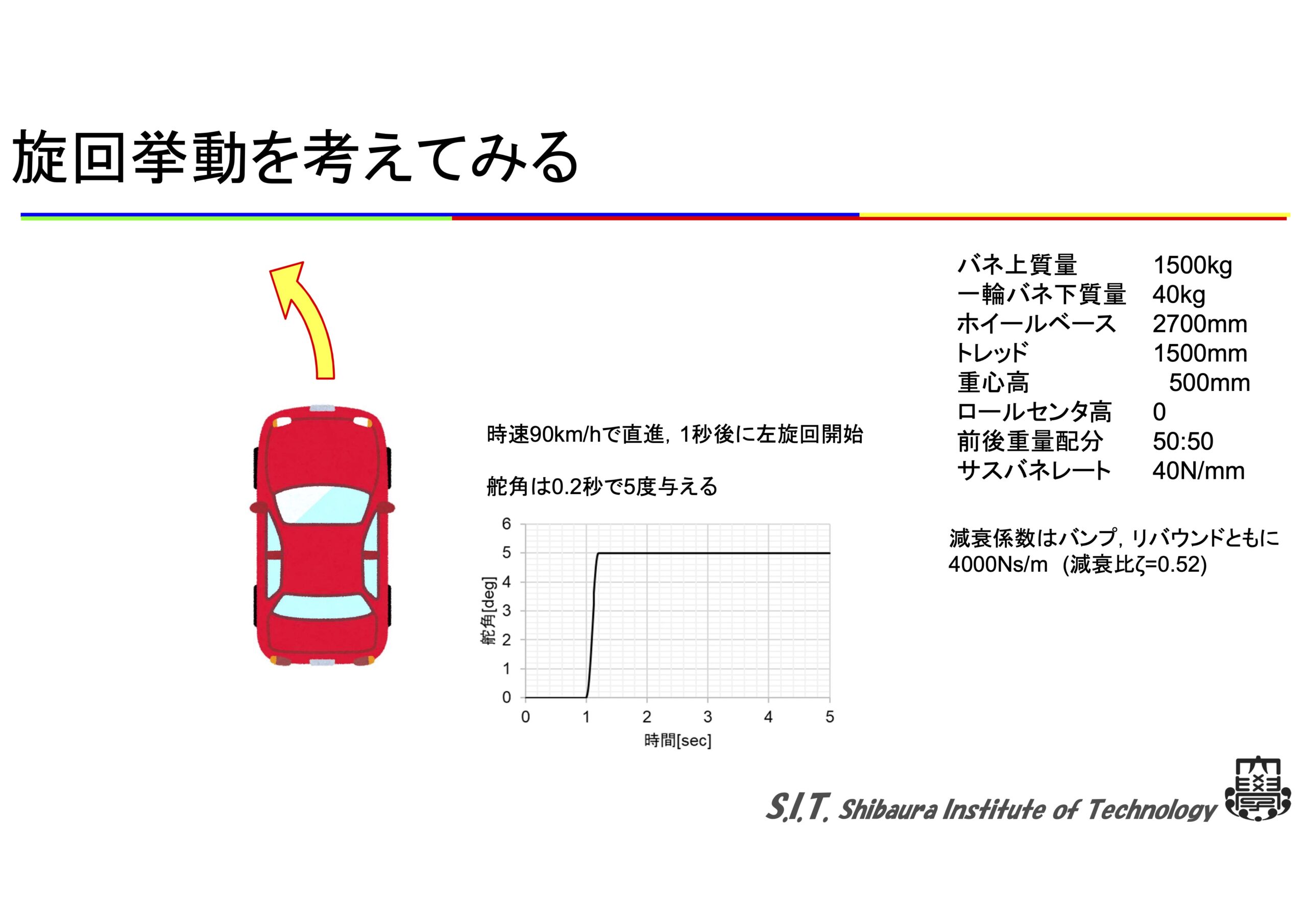
旋回挙動を考えてみましょう。左旋回をイメージしてください。
時速90km/hで直進し、1秒後に左旋回を開始する。
舵角は0.2秒で5度与える。これは結構舵角を与えていく感じですね。
車両の諸元は一般的な中型セダンで、表示されている減衰係数もスポーツ寄りかな?というセッティングです。
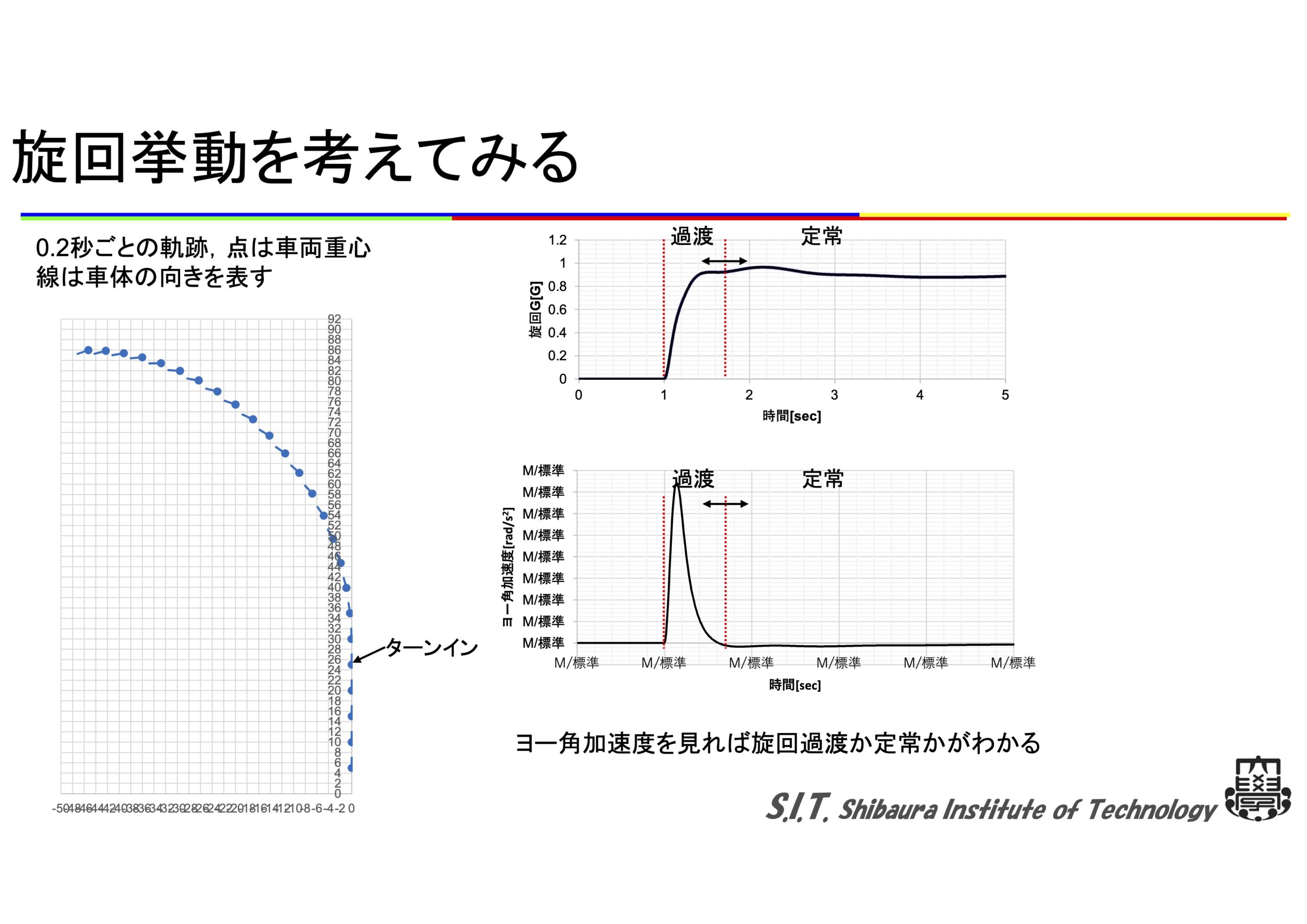
左上は0.2秒ごとの軌跡で、点は車の重心、線は車体の向きを表してします。
先ほど伝えたように時速90km/hで直進し、1秒後に左旋回を開始。舵角は0.2秒で5度与える。これは結構舵角を入れる感じです。
右上のグラフはこの間の旋回Gの変化です。1秒までは直進しているので旋回Gはゼロ。
そこからギューっと旋回Gが立ち上がります。旋回Gが急激に立ち上がって、それから旋回Gの値は一定(定常)になっていく。そういう旋回Gの変化となっていきます。
では、どこで旋回でGが立ち上がって定常域へ移るまでの「過渡域」が入るのか。それを右上の旋回Gのグラフでは、定常になるまで一定となっているのが過渡かなと思うのですが‥‥‥、それがハッキリとわかるには、
(右下の図へ)
ヨー角加速度を見ればいいのですね。定常域になると、ヨー角加速度はゼロになります。すなわち、角速度が一定になるので、角加速度としてはゼロになる。すなわちヨー角加速度の数値がプラスである段階では、まだまだクルマに回転の加速度が入っている状態なので、まだ定常ではない。
したがって、このヨー角加速度を見れば、過渡域なのか定常域なのかわかります。
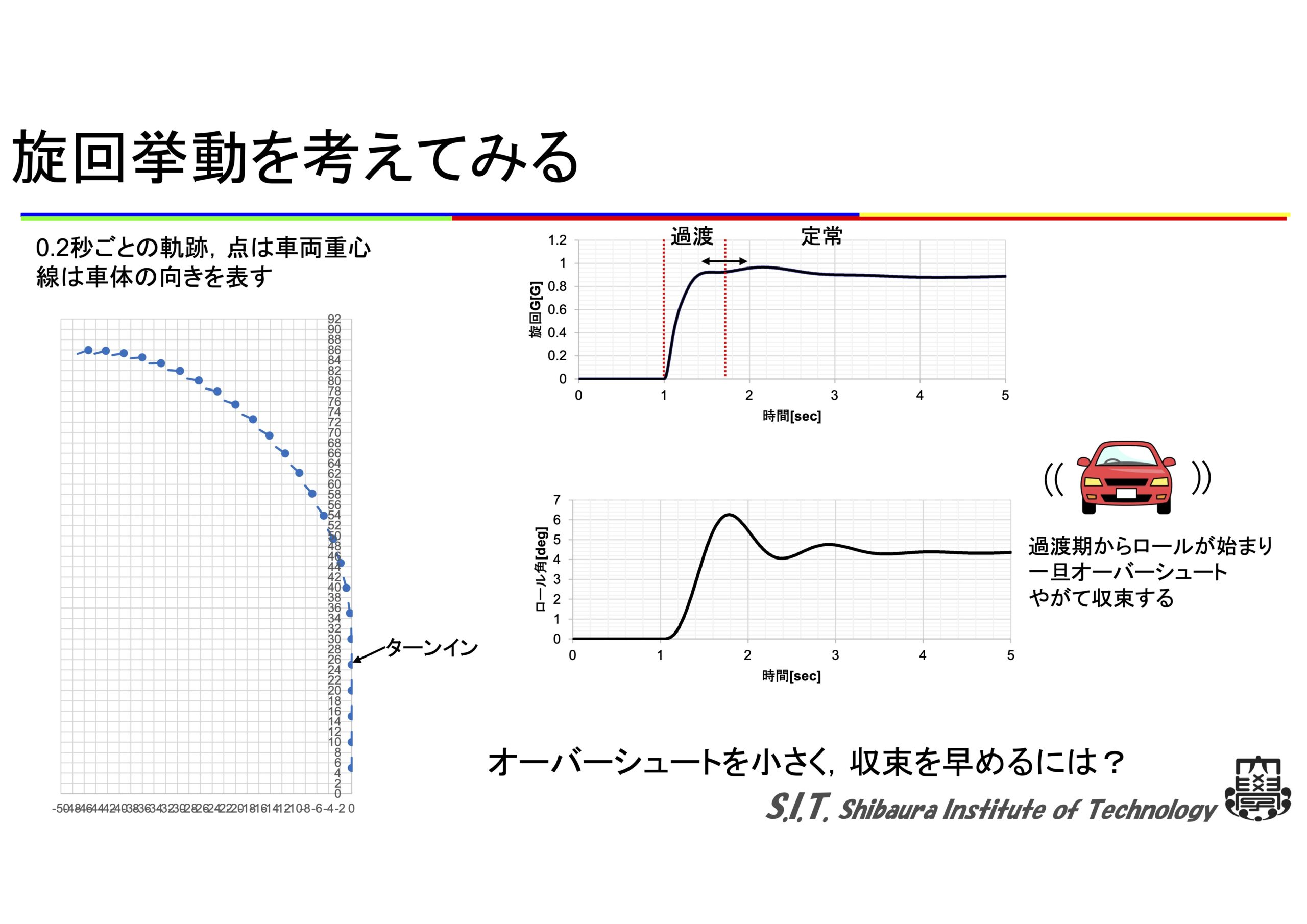
(右下のロール角のグラフへ)
ここでクルマのロール角を見ると、過渡期からロールが始まり、「一度ロール角は行き過ぎて」から戻って、ロール角が定常域になることがわかっています。つまり、ロールはいったんオーバーシュートしているわけです。そして収束する。
これが車酔いの原因に関係するようで、なるべくオーバーシュートを少なくして収束を早めることをダンパーでどうしたらいいか?








