テインの新製品EDFC5の「躍度」制御が画期的! 試乗レポート(前編)〜説明会から凄かった!〜
2023/01/30 14:50
- CATEGORY : ニューパーツ
テインの新製品EDFC5の「躍度(やくど)」制御が画期的!
試乗レポート(前編)〜説明会から凄かった!編〜


テインEDFC5の新機能レポート(前編)
テインの新製品EDFC5の試乗会が箱根ターンパイクで行われた。
試乗前に行われたのが新機構の説明会。それも「躍度(やくど)」という聞きなれない新制御について、じっくりと時間が取られた。
この「躍度」制御がとても興味深い内容で、チューニングアイテムだけでなく、ドラテクにも、サスセッティングにも参考になる点が多かった!
「躍度」制御により、操縦性と乗り心地の両立ができるだけでなく、「旋回性能が上がって軌跡が変わる!インに近づける!!」とのこと。レブスピード的には次世代のスポーツドライビングの可能性を強く感じた。ドラテクを「躍度」制御がカバーしてくれそうなのだ。
と、いうわけで、試乗記は後編でお伝えするとして、今回はその「躍度」についての説明会をじっくりお伝えしよう。

EDFC5は躍度(ジャーク)AI 制御を取り入れている。芝浦工業大学との共同で研究、開発のもと生まれた新機能だ。

画期的な「躍度」(JERK /ジャーク)制御を取り入れた
テインEDFC5の新機能
前モデル「EDFC Active Pro」は、4つのダンパーの減衰力を、コントローラーでリモート調整できるだけでなく、内蔵のGセンサーにより加減速G、横Gに応じて減衰力を自動調整。さらにGPSセンサーにより、車速に応じて減衰力の自動調整を行える。
テインでは、このEDFCをさらに進化させるべく、モータスポーツ(ラリーなど)でも開発しているデータを活かせないか検討していた。
また、学生のものづくりのサポートの一環として「学生フォーミュラ」への協力、協賛なども行っていたが、この過程で芝浦工業大学の渡邉大教授との出会いがあった。
学生フォーミュラにおいて、技術面での討議を進めていく中で、渡邉教授の研究内容を、EDFCの制御に活かせないかという話から、産学連携による開発がスタートしたのだった。

次ページからは、渡邉教授による「躍度」についての説明を再現!
「躍度」制御は旋回荷重のオーバーシュートを抑制し
収束を早める自動調整機能

ここからは、芝浦工業大学 システム理工学部 機械制御システム学科 渡邉 大教授
による「躍度」制御の説明を再現するコーナーだ。
躍度の計算で、高価なヨーレートセンサーが必要ない?
渡邉教授
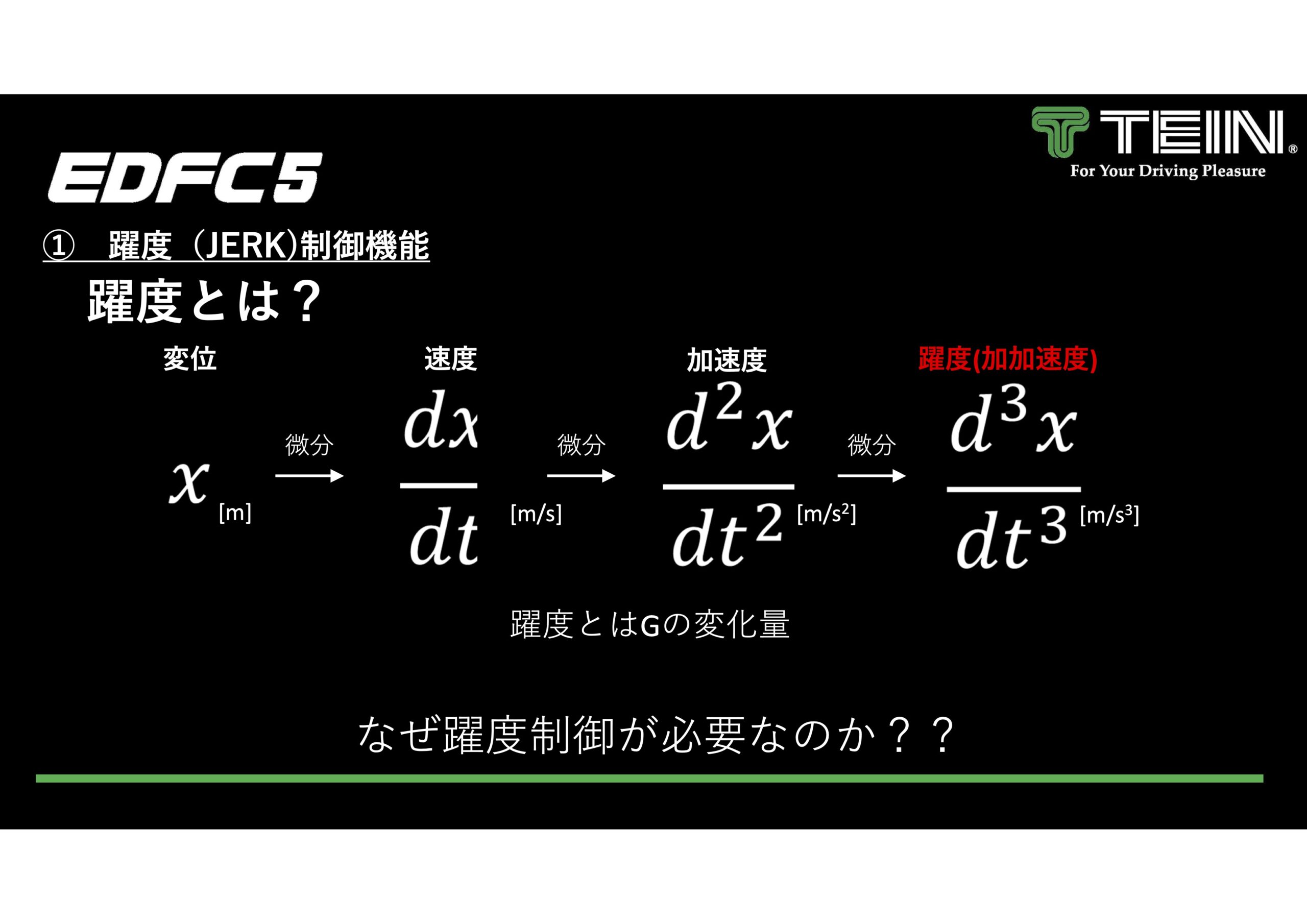
まず、躍度とは何か? について説明しましょう。
「変位(距離)」を「時間」で微分すると「速度」になります。
「速度」をさらに「時間」で微分すると「加速度」が出てきますね。
「躍度」というのは、「加速度」をさらに「時間」で微分した物理量で、「Gの変化量」と捉えてもらえばいいでしょう。
ではなぜ、躍度制御が必要なのか?
その前に旋回挙動を考えてみましょう。
旋回挙動を考えてみましょう。左旋回をイメージしてください。
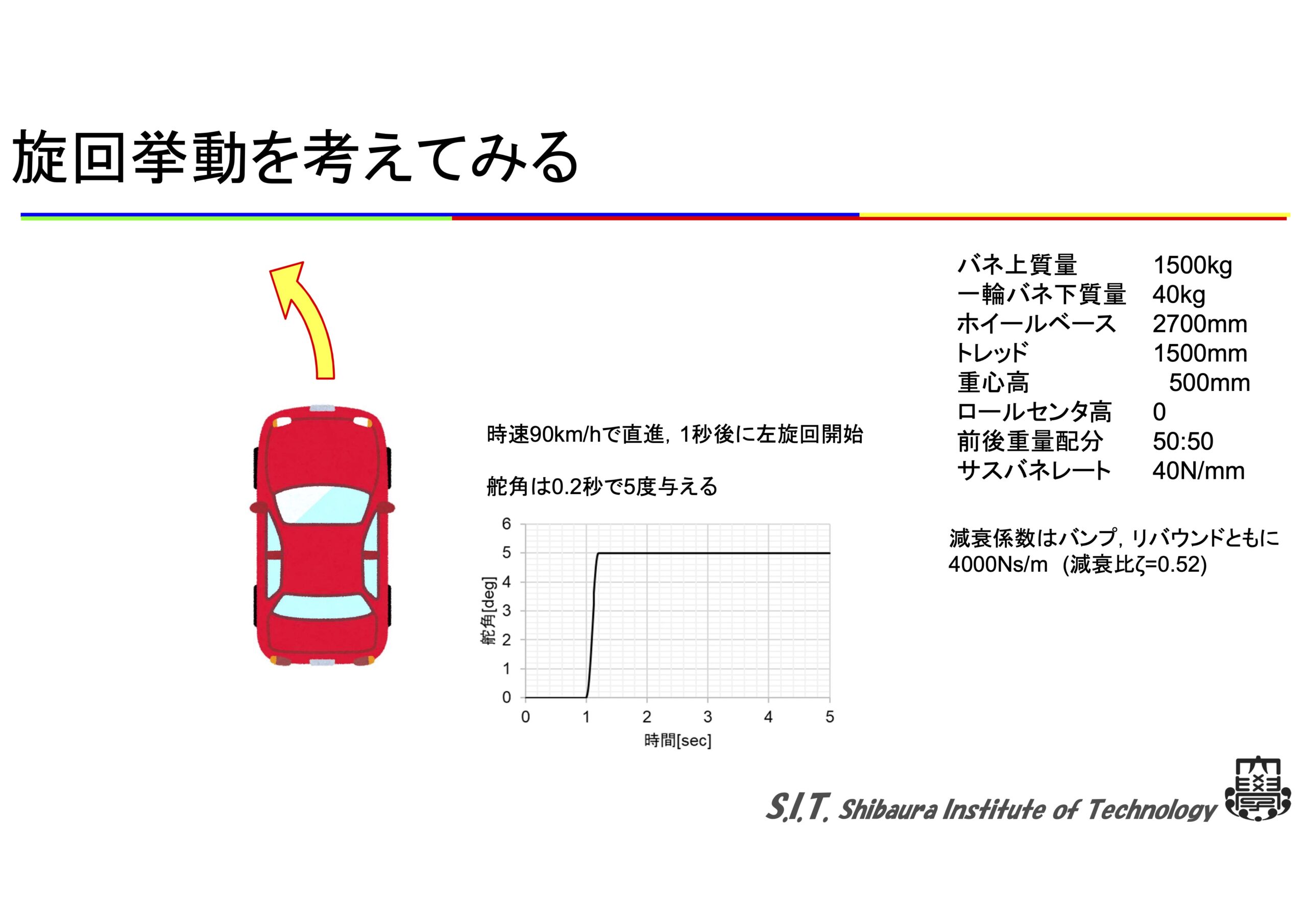
時速90km/hで直進し、1秒後に左旋回を開始する。
舵角は0.2秒で5度与える。これは結構舵角を与えていく感じですね。
車両の諸元は一般的な中型セダンで、表示されている減衰係数もスポーツ寄りかな?というセッティングです。
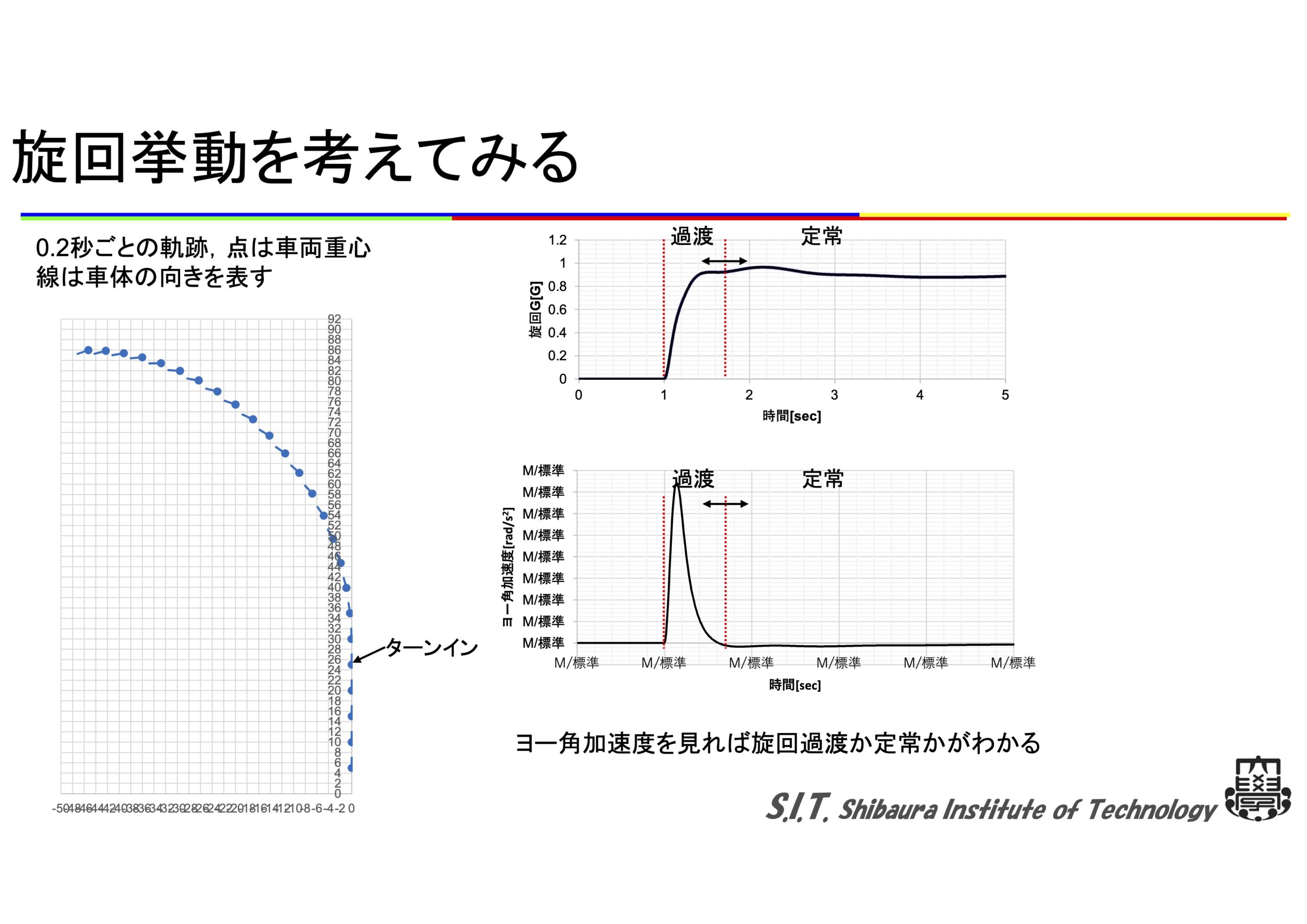
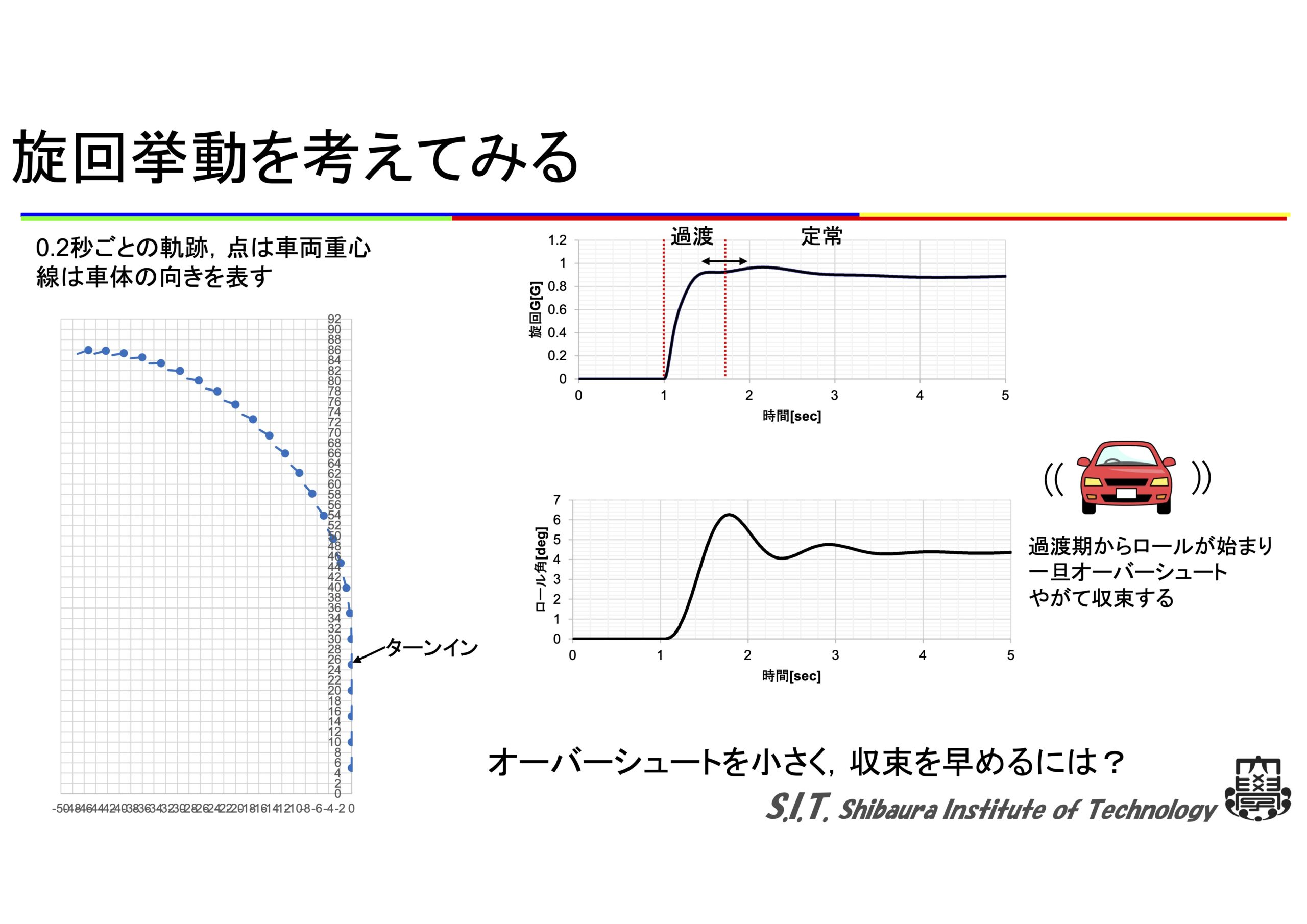
左上は0.2秒ごとの軌跡で、点は車の重心、線は車体の向きを表してします。
先ほど伝えたように時速90km/hで直進し、1秒後に左旋回を開始。舵角は0.2秒で5度与える。これは結構舵角を入れる感じです。
右上のグラフはこの間の旋回Gの変化です。1秒までは直進しているので旋回Gはゼロ。
そこからギューっと旋回Gが立ち上がります。旋回Gが急激に立ち上がって、それから旋回Gの値は一定(定常)になっていく。そういう旋回Gの変化となっていきます。
では、どこで旋回でGが立ち上がって定常域へ移るまでの「過渡域」が入るのか。それを右上の旋回Gのグラフでは、定常になるまで一定となっているのが過渡かなと思うのですが‥‥‥、それがハッキリとわかるには、
(右下の図へ)
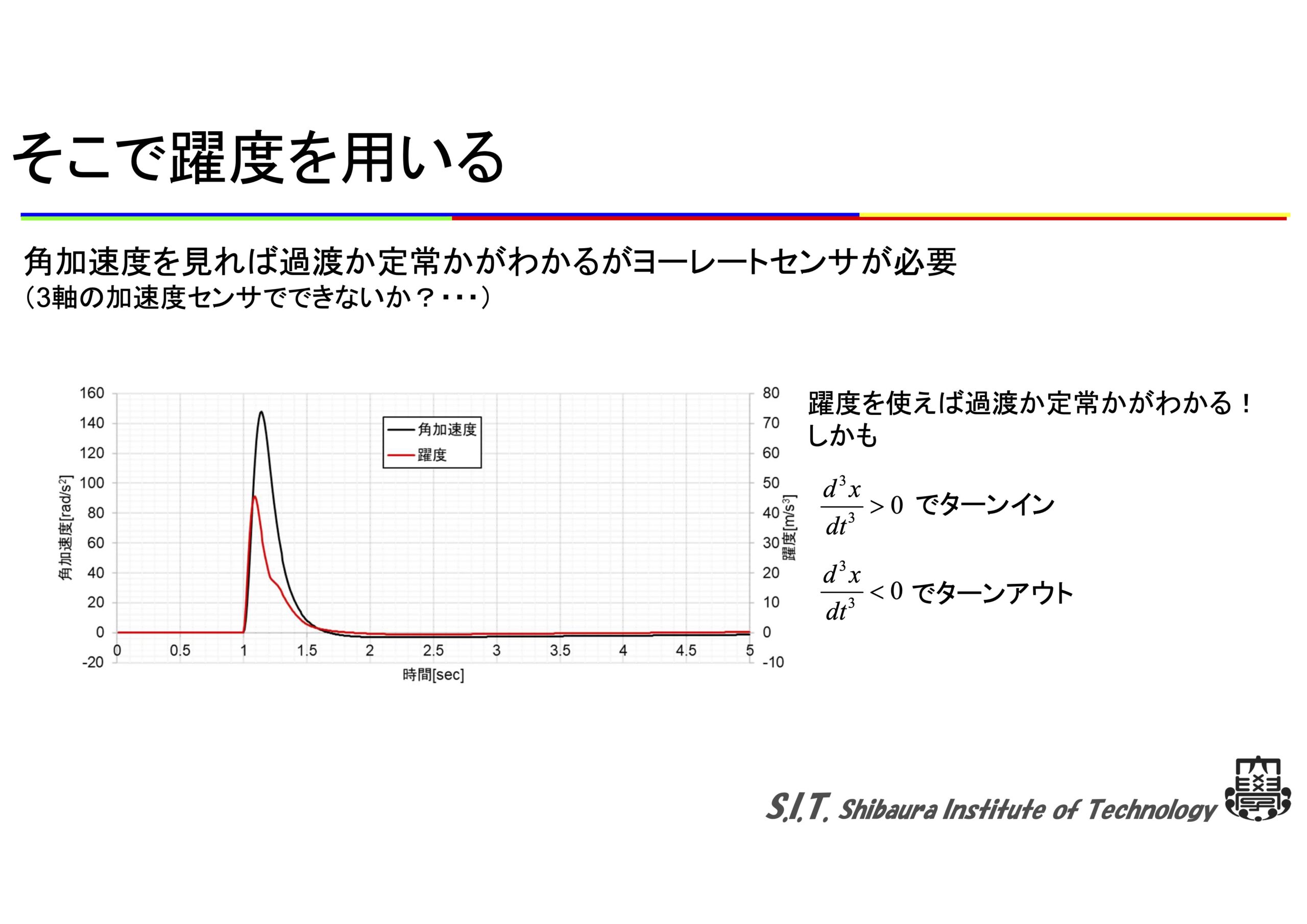
ヨー角加速度を見ればいいのですね。定常域になると、ヨー角加速度はゼロになります。すなわち、角速度が一定になるので、角加速度としてはゼロになる。すなわちヨー角加速度の数値がプラスである段階では、まだまだクルマに回転の加速度が入っている状態なので、まだ定常ではない。
したがって、このヨー角加速度を見れば、過渡域なのか定常域なのかわかります。
(右下のロール角のグラフへ)
ここでクルマのロール角を見ると、過渡期からロールが始まり、「一度ロール角は行き過ぎて」から戻って、ロール角が定常域になることがわかっています。つまり、ロールはいったんオーバーシュートしているわけです。そして収束する。
これが車酔いの原因に関係するようで、なるべくオーバーシュートを少なくして収束を早めることをダンパーでどうしたらいいか?
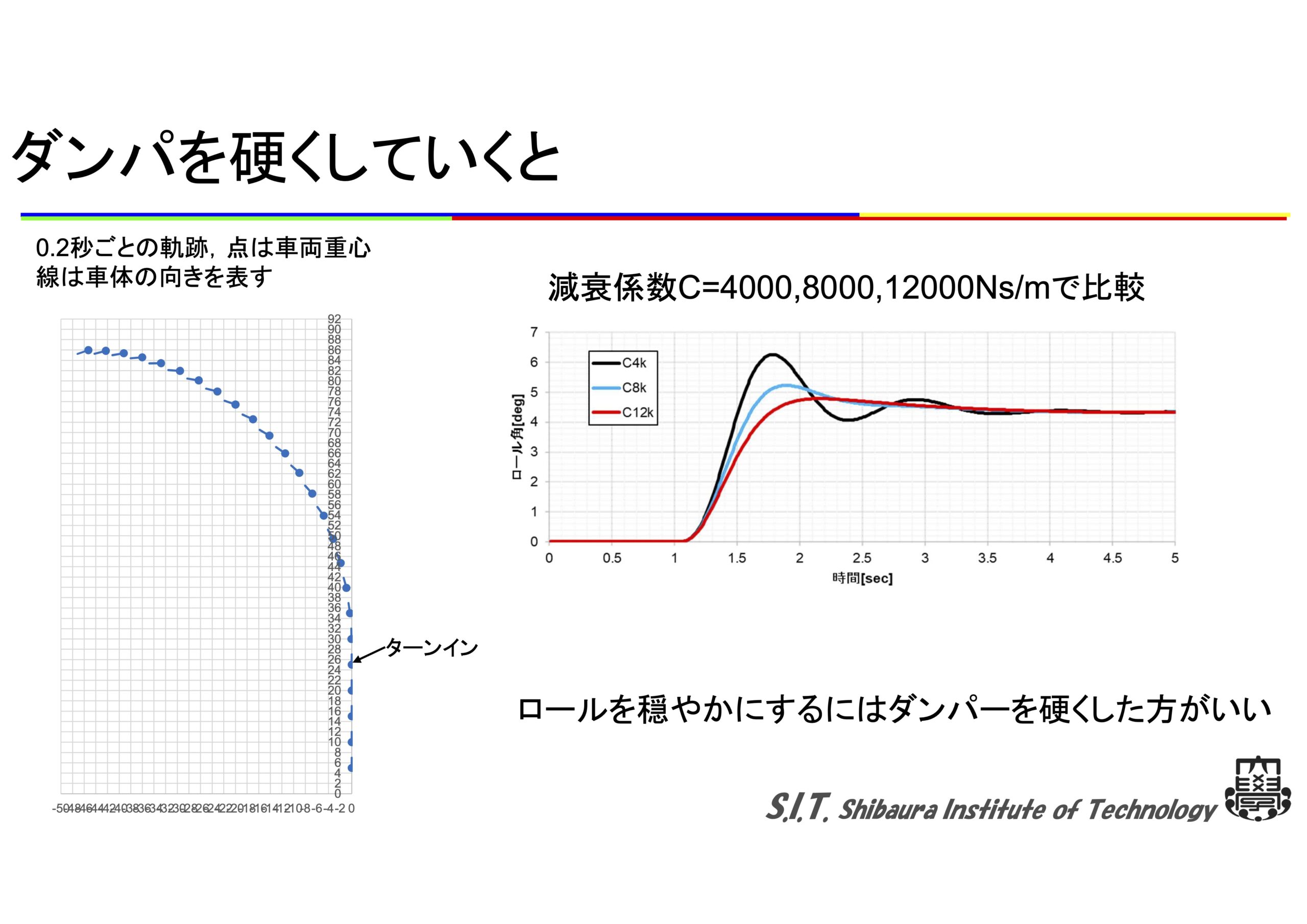
ロールを穏やかににするにはダンパーを硬くした方がいいが
定常域での乗り心地は悪化する‥‥‥
ダンパーを硬くしていき、右上のグラフの減衰係数では軟らかめの4000(黒線)Ns/mから、8000(青線)、12000(赤線)と硬くしていきロール角を比較していくと、
ガチガチに硬めていったほうがオーバーシュートは少なく、ロールスピードもゆっくりとなります。
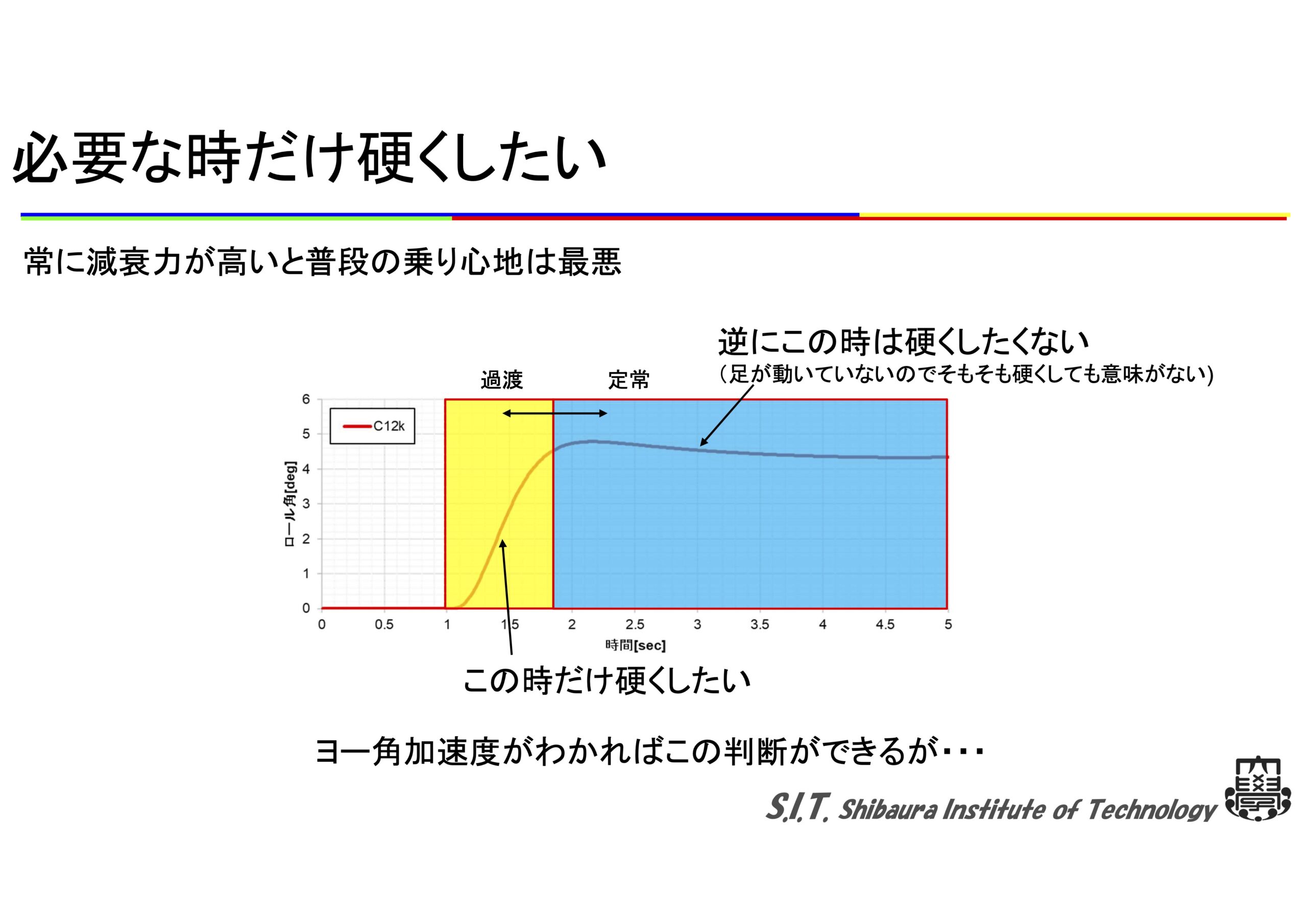
ロールだけを考えると、ダンパーを硬くした方がいい。だだし、つねにガチガチだと、普段の乗り心地は最悪になります。
つまり揺り戻しのオーバーシュート対策に、過渡域だけダンパーを硬くしたい。
そして定常の時には硬くしたくない。定常域では姿勢は一定で変わらないため、硬くしてもそもそも意味がない。ダンパーは動いて反発する力が発生するものなので。もし、この定常域で姿勢が変わらないのにもダンパーが硬いと、路面のうねりや入力があると乗り心地は最悪になる。それにともない、タイヤの接地荷重の変動も大きくなる。
ここで、先ほどの「ヨー角加速度」です。ヨー角加速度がわかれば、ダンパーを硬くするのに必要な域が判断できるのです。
ここで、先ほどの「ヨー角加速度」です。ヨー角加速度がわかれば、ダンパーを硬くするのに必要な域が判断できるのです。
しかし、このヨー角加速度をみるのは、(高価な)ヨーレートセンサーが必要になってくる。これを3軸の加速度センサーで実現できないか?
それで持ち出したのが躍度です。黒い線が角加速度、赤い線が躍度。波形は似てますよね。
形の大きさは違います。軸が違う(グラフ左右にそれぞれの単位)のですが、波形は同じ。つまり躍度を使えば、過渡域か定常域かわかるのです。
躍度を計算するとプラスだとターンイン、つまりどんどん旋回が始まるので角加速度が増えていく。旋回Gが増えていくと、指標としてはプラスとなる。
定常から直線に戻ろうとする時には、今度はGが減少していきます。減少していくのはマイナスでターンアウトになるというのが、躍度を使えば判断できます。
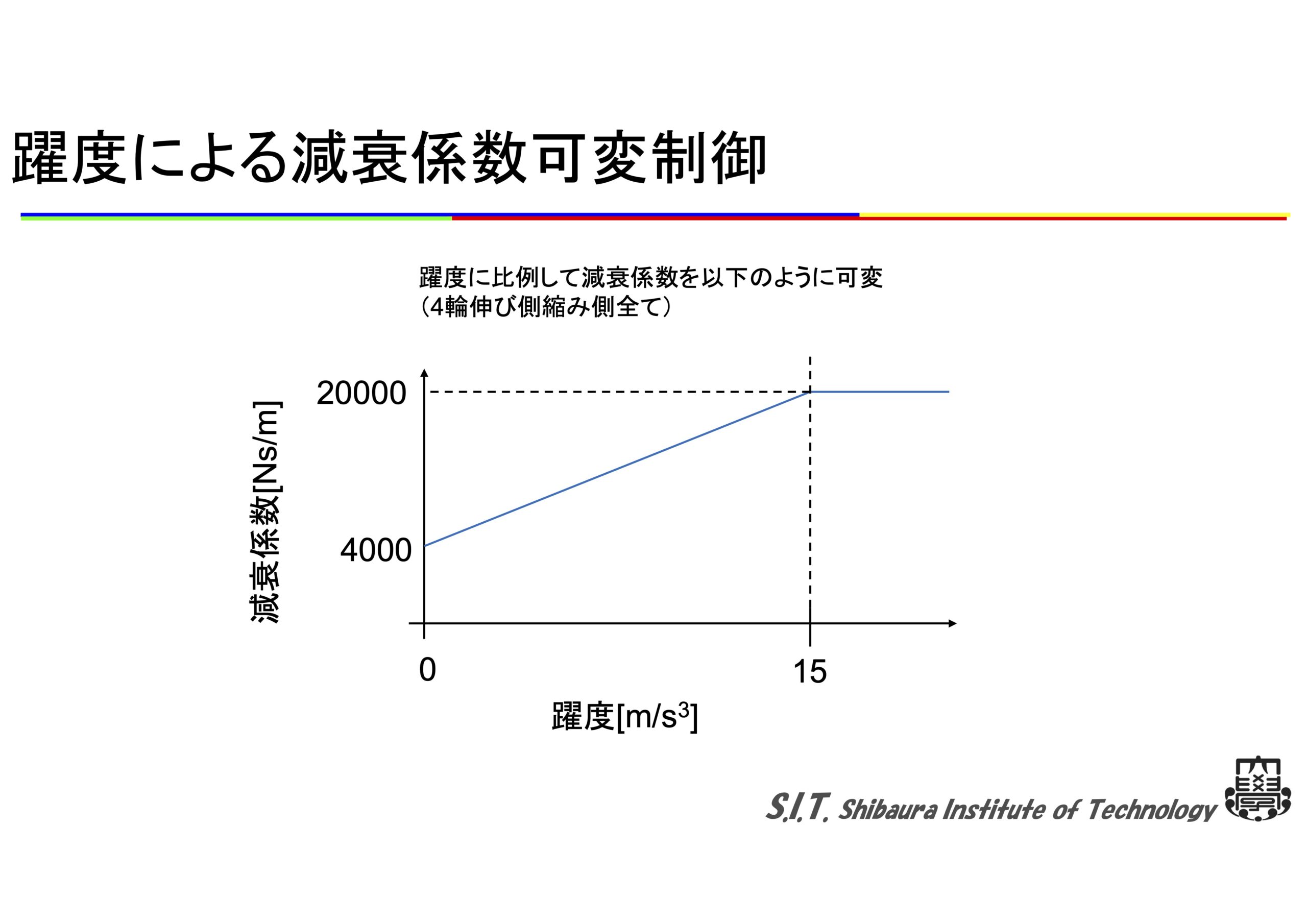
そこでこんなシミュレーションをしてみました。躍度に応じて、減衰力を変える。躍度が上がるにつれて、減衰力を高めていく。このシミュレーションでどうなったか? ここでは4輪すべて同じ減衰の制御です。
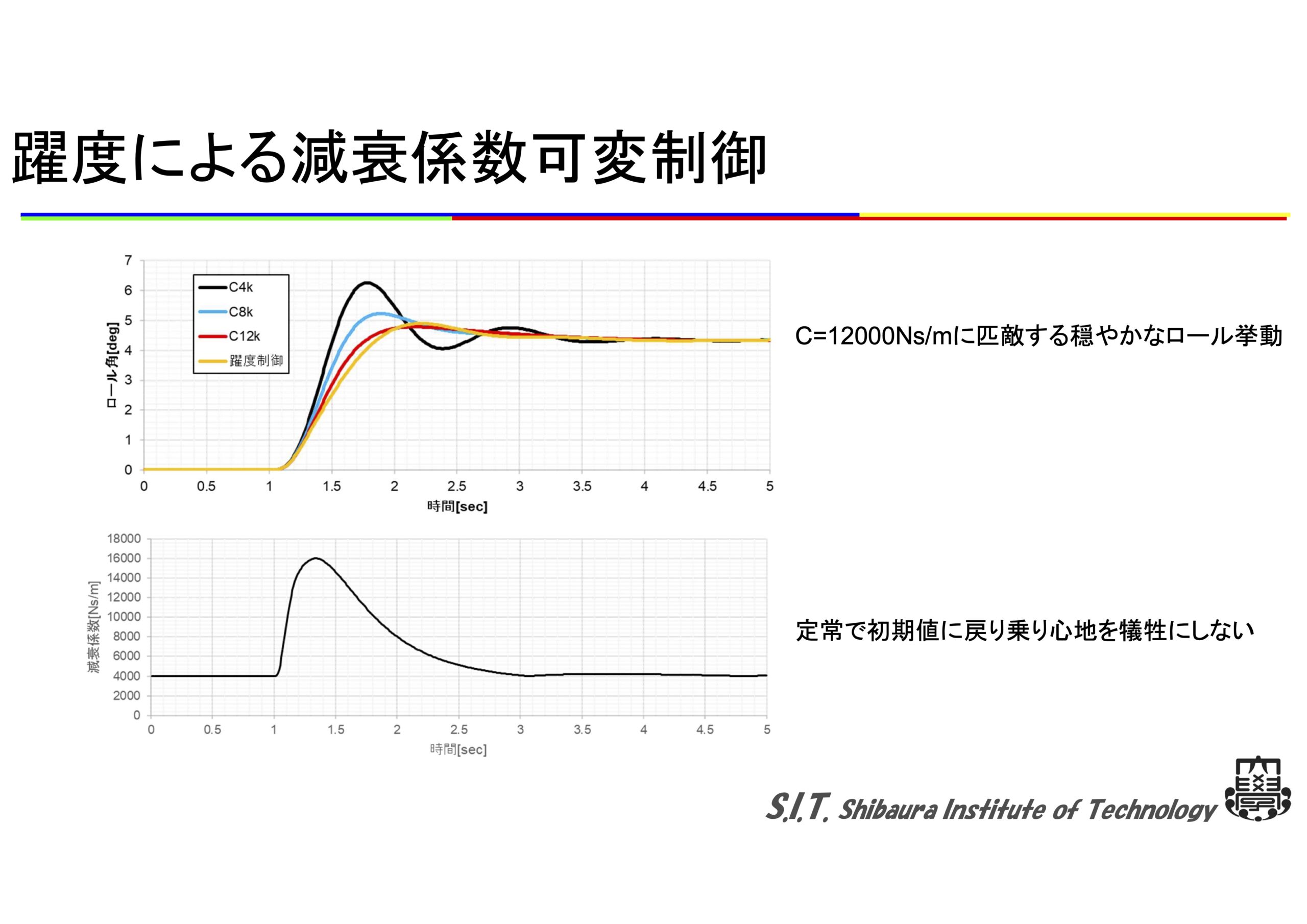
上のグラフの縦軸はロール角、横軸は時間になります。先ほどの減衰力を変えた4000(軟らかい)、8000,12000(硬いガチガチ)の減衰係数のグラフに加えて、躍度制御したグラフがオレンジです。
そうすると躍度制御でガチガチでとても乗れないような乗り心地を無視した12000に肉薄できるような、穏やかなロール挙動の波形が得られることがわかります。
しかも、下のグラフはそのシミュレーションでの減衰の変化になりますが、旋回の過渡のときだけ減衰を高めてやる、定常域では初期値に戻り、乗り心地を犠牲にしない。
そういう制御が躍度を使えばできるのです。
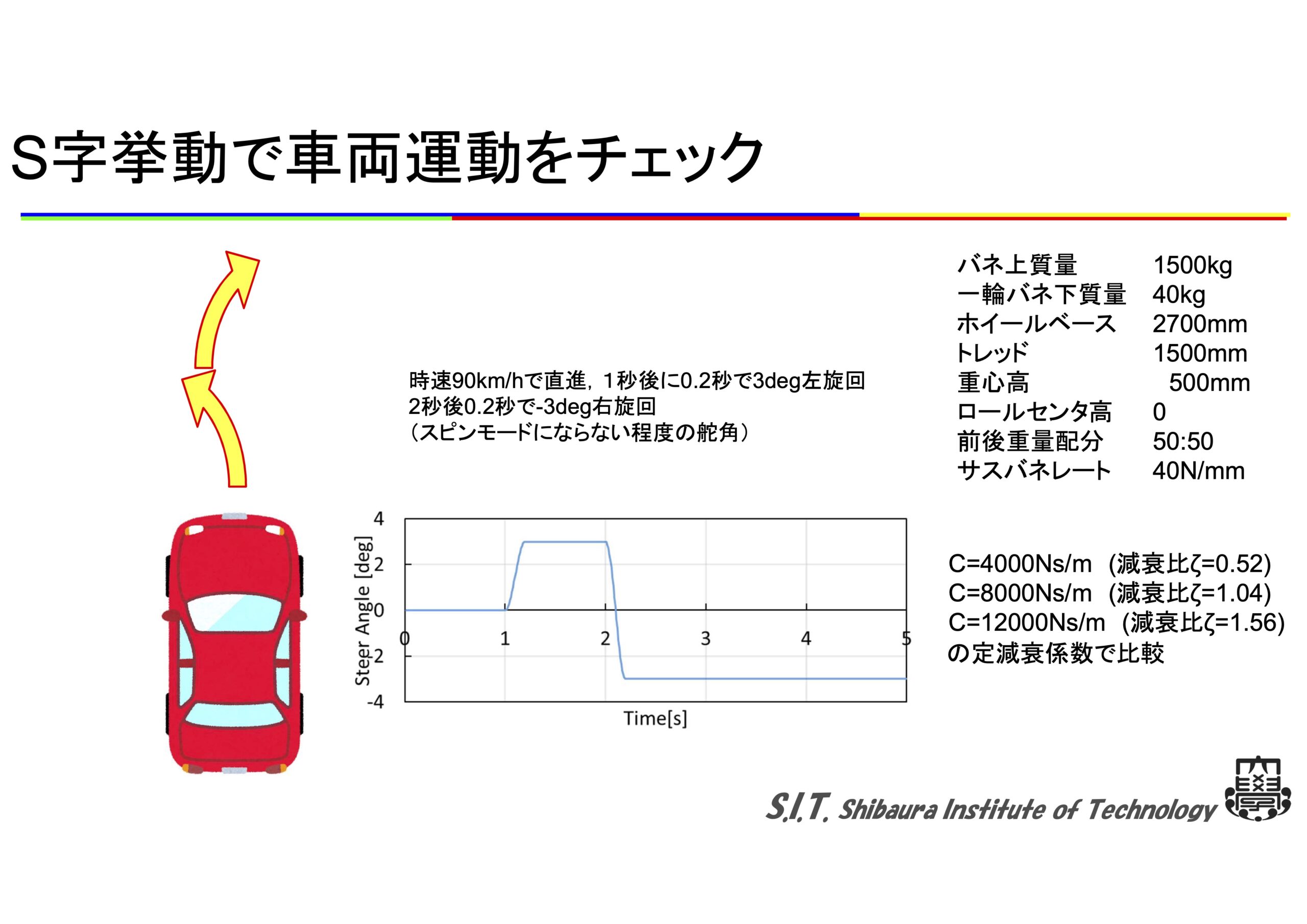
今度は別のシミュレーションをしてみます。先ほどまでは左旋回だけだったのが、今度はS時旋回です。
同じように90km/hで直進。
1秒後に0.2秒で左に舵角を3度与えて左旋回に。
その1秒後に0.2秒で逆の右に舵角が3度になるよう切り返す。
これを減衰力がさきほど同様の3パターンで行います。
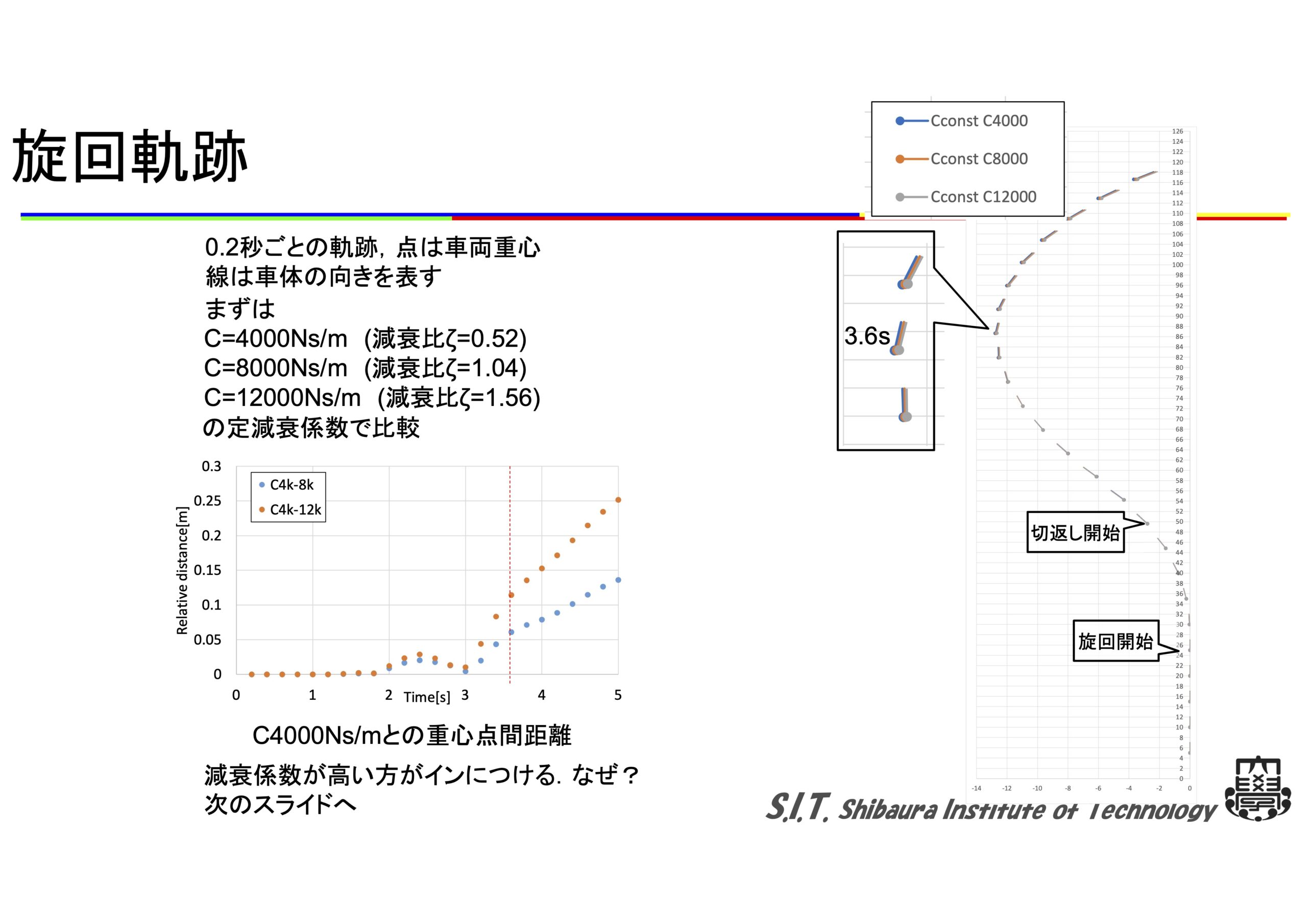
右側が旋回の軌跡です。これを見ていくと、減衰の違いにより辿っていく軌跡が若干変わります。
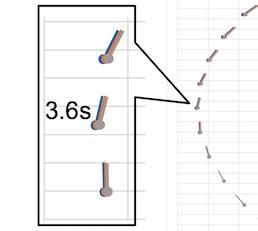
右の拡大画像を見ると、減衰力が高い方が、軌跡が内側に入っていくんですね。
左のグラフだと、C4000(軟らかい)との重心点間距離から8000、12000と硬くしていったほうがインにつける。それはどれくらいか? このグラフからだと10cmくらいか? それでも、減衰係数が高いほうがインにつける。なぜか?次スライドへ。
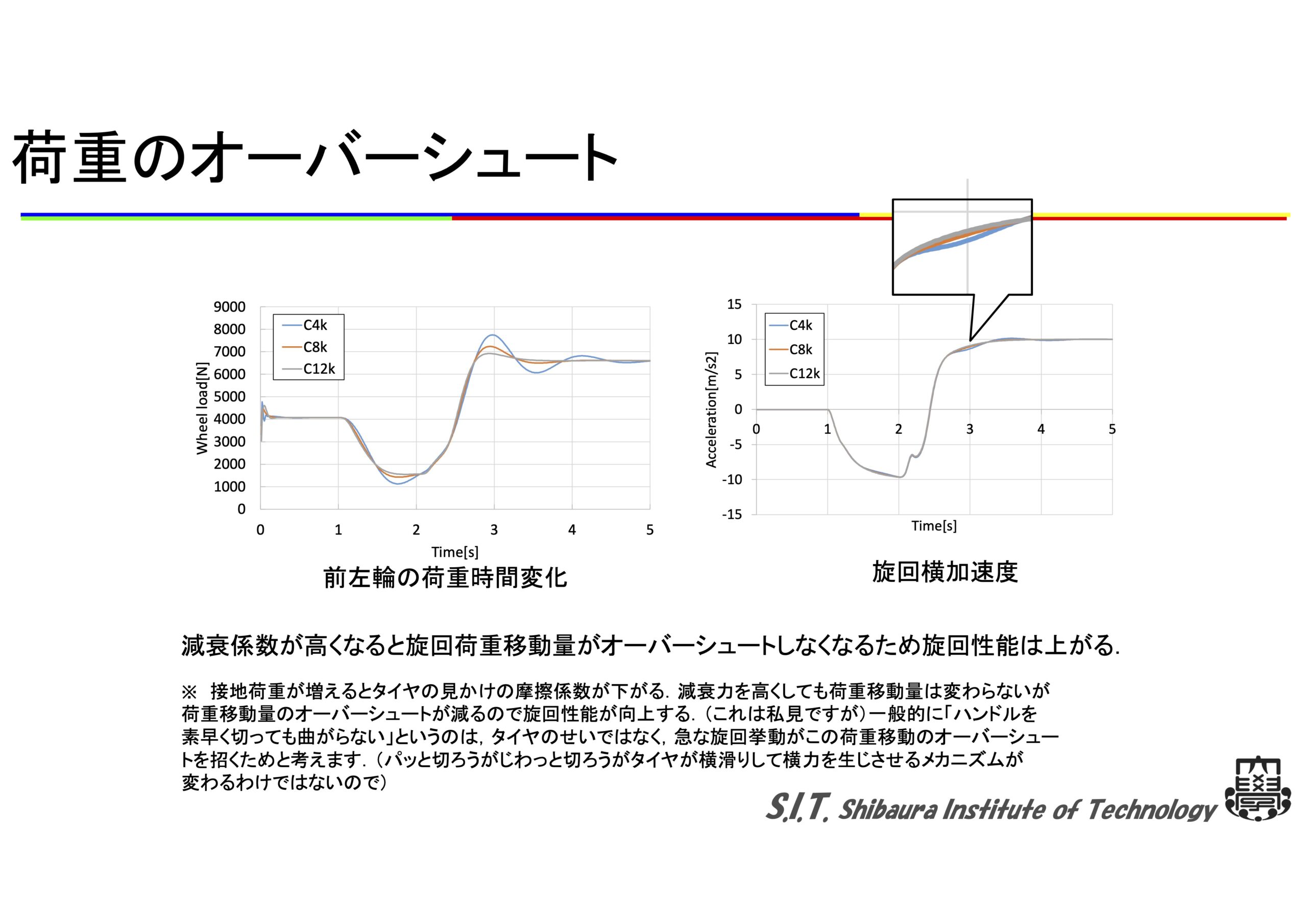
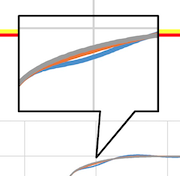
荷重がオーバーシュートしてしまうとタイヤの見かけの摩擦係数が下がる
左グラフは左前輪の接地荷重の時間変化。減衰が軟らかい4000はオーバーシュートし(荷重が行き過ぎて)、そして揺り戻しが大きい。減衰が上がるとオーバーシュートしなくなるため旋回性能が上がります。
右グラフは旋回横加速になりますが、軟らかい方が若干下がる。
それはなぜか。タイヤの特性に由来します。接地荷重が増えるとタイヤというのは見かけの摩擦係数が下がってしまいます。これが、車両重量が軽いクルマのほうが旋回性能が高いといわれている所以はここにあるわけです。
減衰力を高くしても、荷重の移動量は変わらないわけですけど、オーバーシュートが減るので、旋回性能は向上していく。
左グラフで切り返しのポンと荷重が上がっているところは、見かけの摩擦係数は下がっていますので、この差で旋回性能は変わってくる。
これは私の私見ですが、「ハンドルを素早く切っても曲がらない」というのは、おそらくこれはタイヤのせいではなくて、急な旋回挙動がこの荷重移動のオーバーシュートを招いていると考えています。そのためズルッと滑る、そんなイメージになるのではないかと。
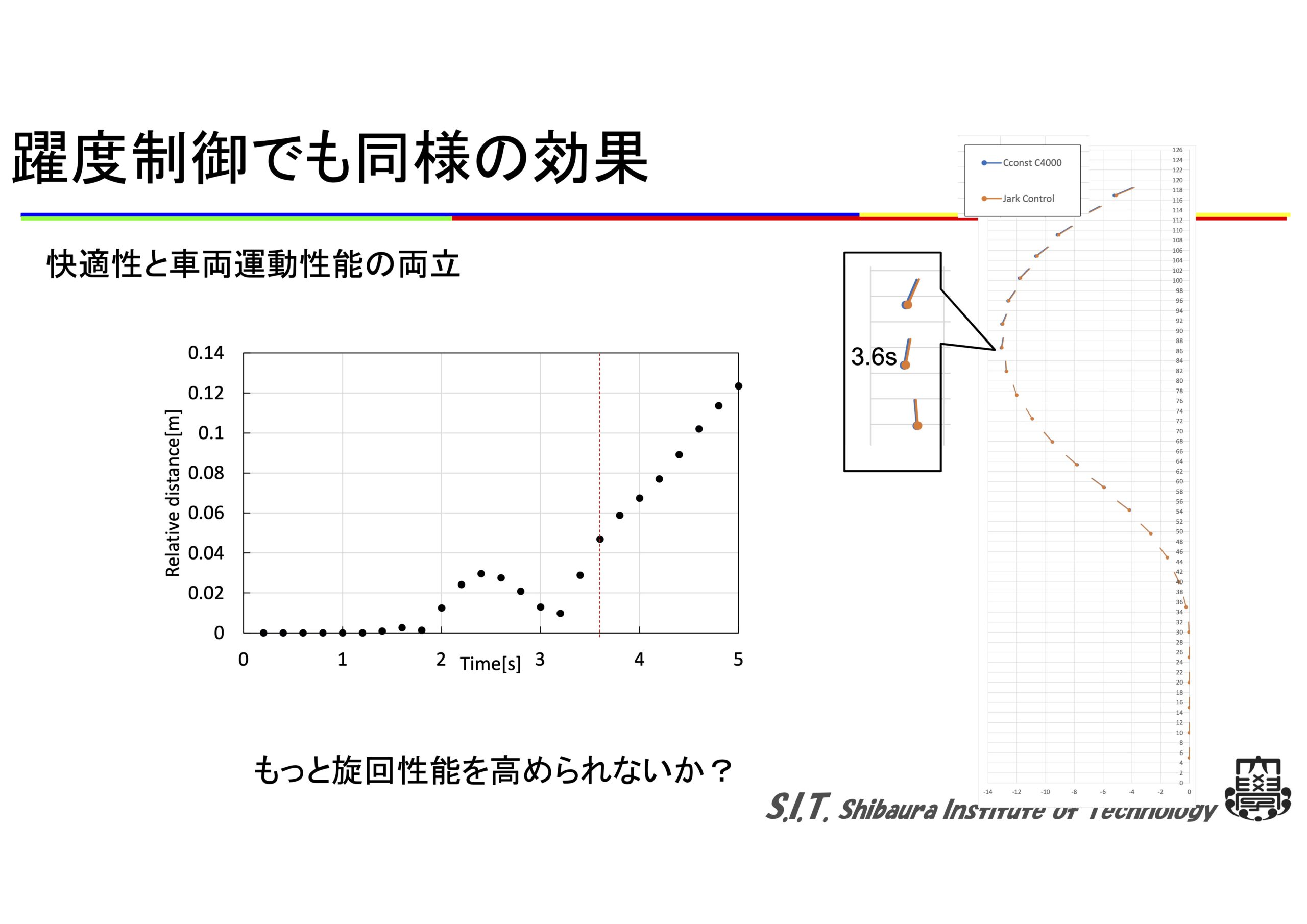
躍度での制御でも、旋回の時に硬めて荷重のオーバーシュートを防いでやると、同様の効果があります。その旋回の時だけ減衰を上げるだけでも、同じ舵角を与えても若干インにつける。運動性能と乗り心地の両立ができます。
ここでオーバーシュートを4輪個別に行う
スポーツドライビングについても深い話に 次ページへ
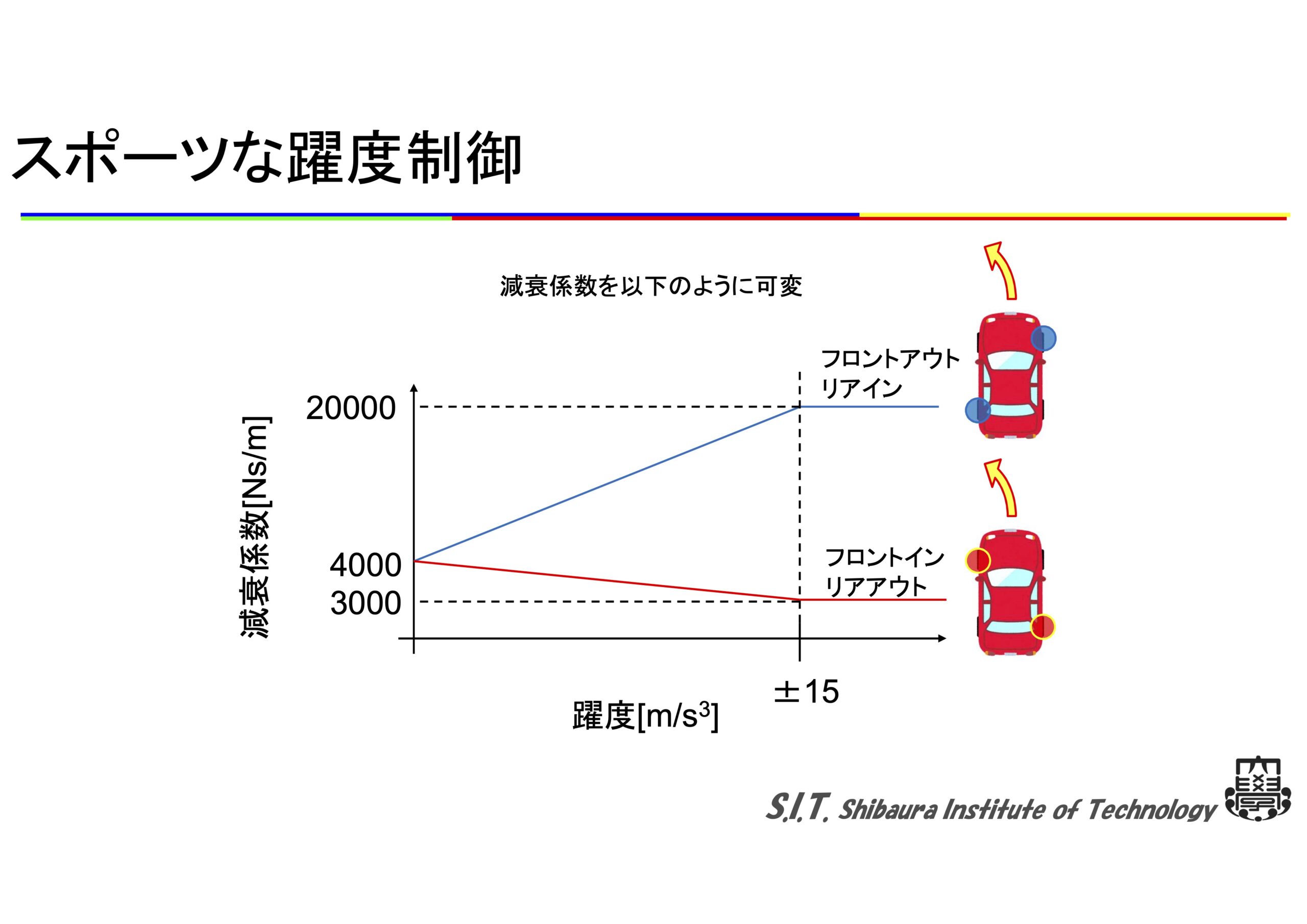
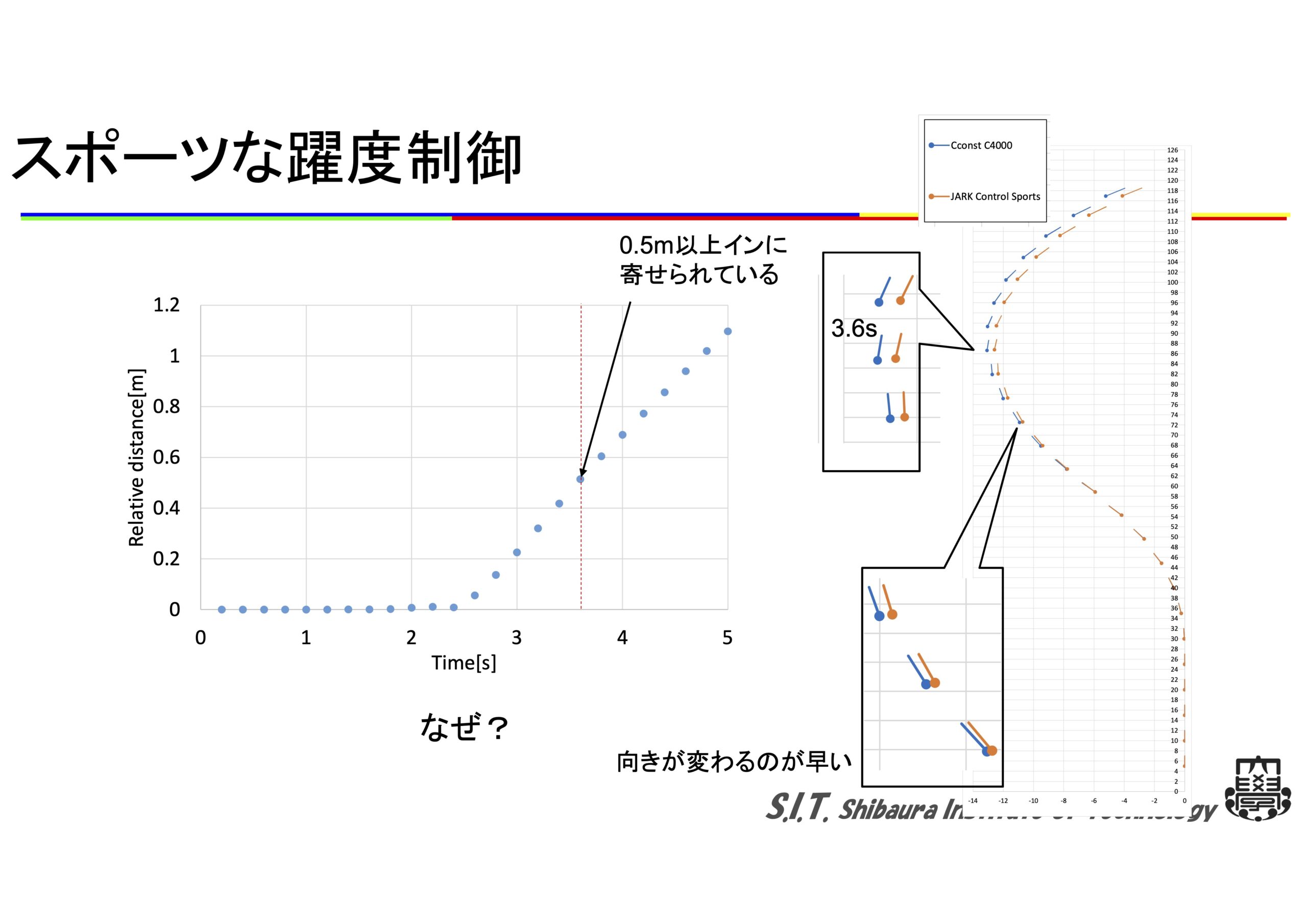
スポーツな躍度制御を考えてみました。オーバーシュートの制御を4輪で個別に行うのです。躍度に応じて、フロントのアウト側と、リアのイン側を硬くする。そしてフロントのイン側、リアのアウト側を軟らかくする。こんな制御をやってみました。どうなると思います?(笑)すると、圧倒的にインにつけるんです!
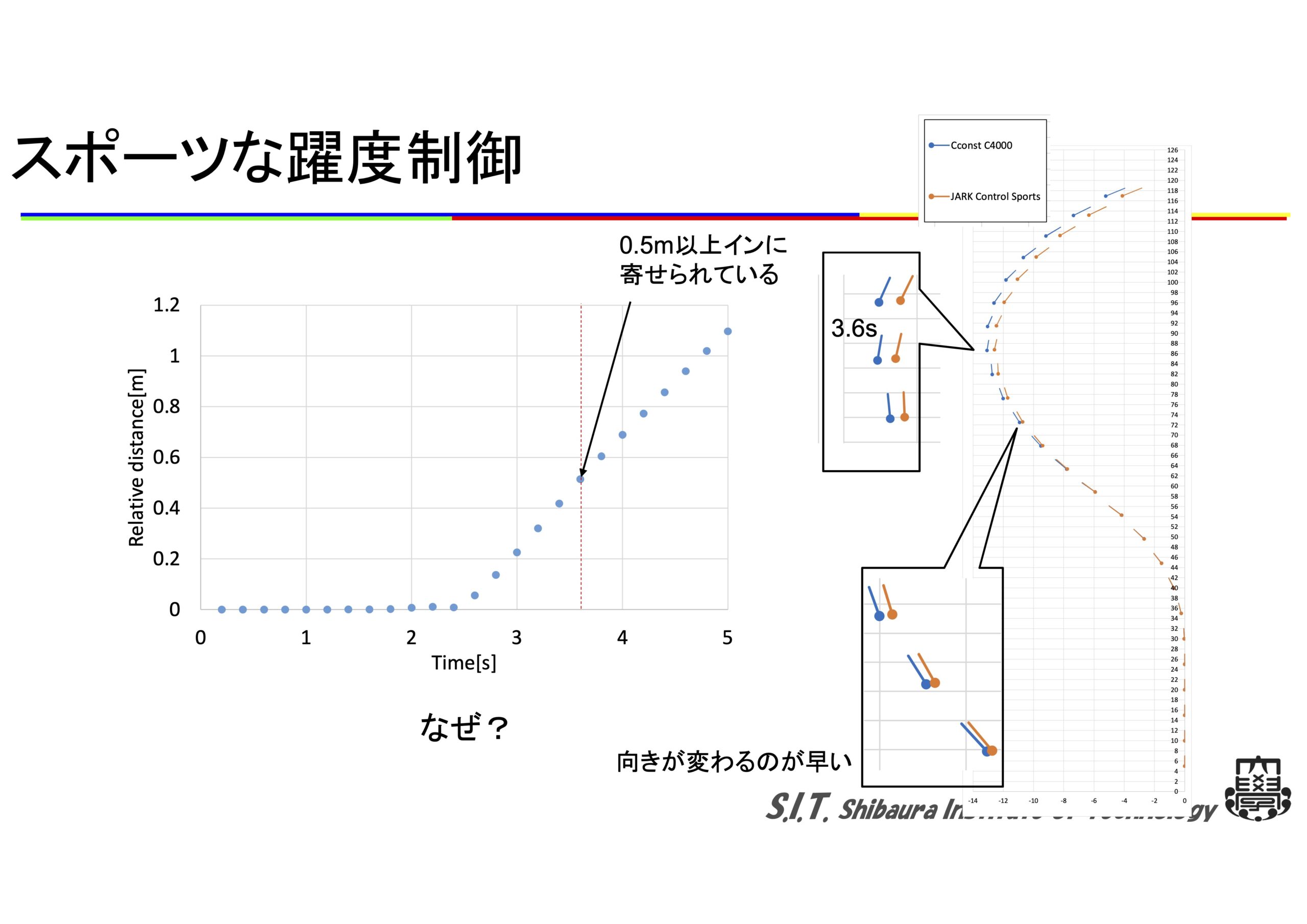
このスポーツな躍度制御は、圧倒的にインにつけるんです。目に見えて差が出ています。
最初に左に切った時はそんなに軌跡の差は出ていないんですが、右に切り返したときに向きが変わるのが早い。結構クルマの角度の違いがあります。その結果、明らかに軌跡が変わってきます。その差は50cmくらいインに寄せられています。同じ舵角を与えていくのに関わらずですね。
この制御でのクルマの車高を見てみましょう。
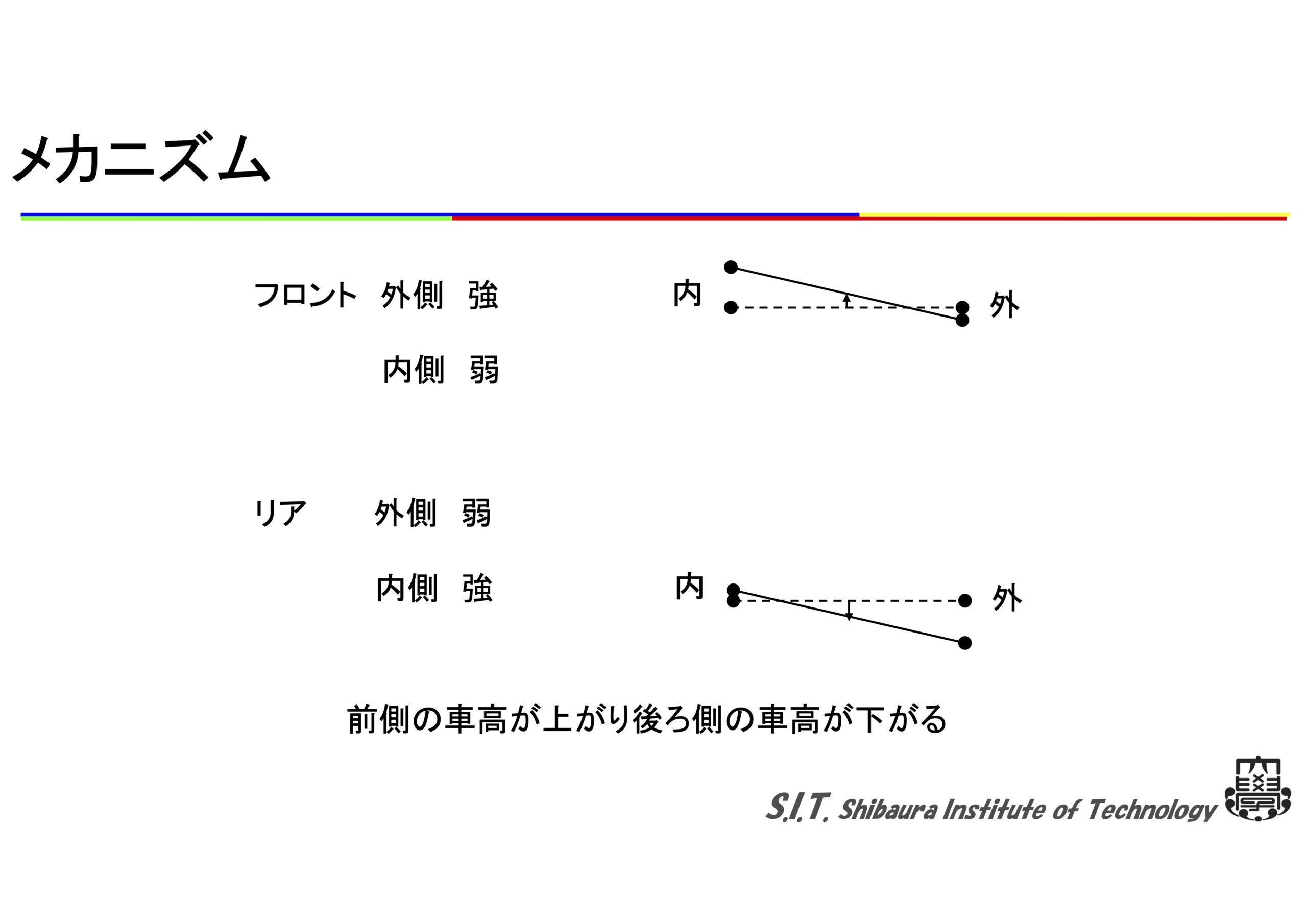
フロント外側は減衰を強く、内側は弱くした場合。黒線は車両の正面からみた車両の傾きのイメージです。外側はあまり沈まない。内側はだいぶ浮く。
リアは外側は弱く、内側を強く。外側はぎゅっと大きく沈み、内側は伸びずにあまり浮かない。
車両全体から見ると、前側の車高は上がり、後ろ側の車高が下がる。
これは角度でいうとほんの少しで、1度とか、2度くらいです。
これの車高の変化を横から見てみましょう。
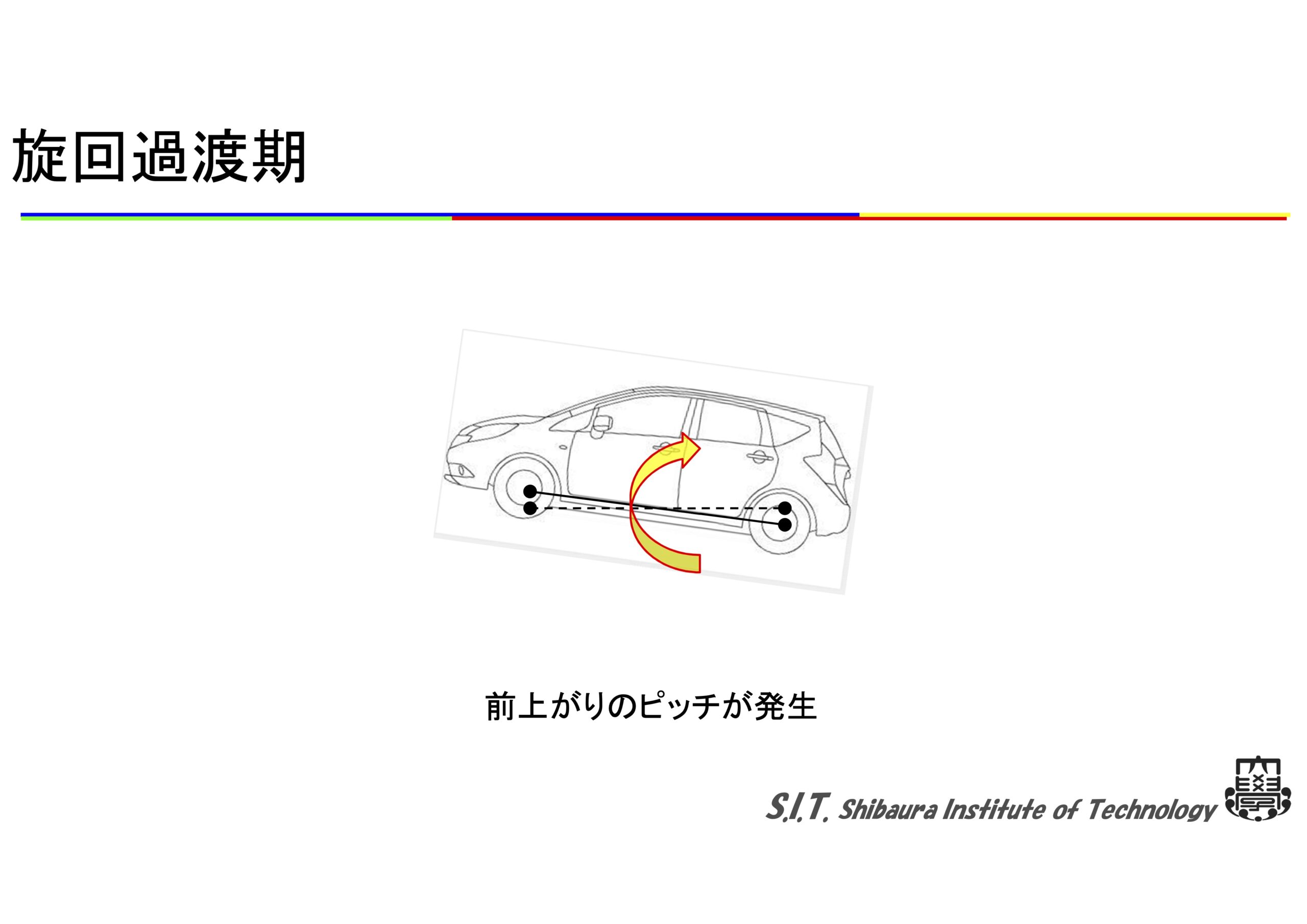
旋回過渡期に車両全体から見ると、前側の車高は上がり、後ろ側の車高が下がるため、
前上がりのピッチが発生します。
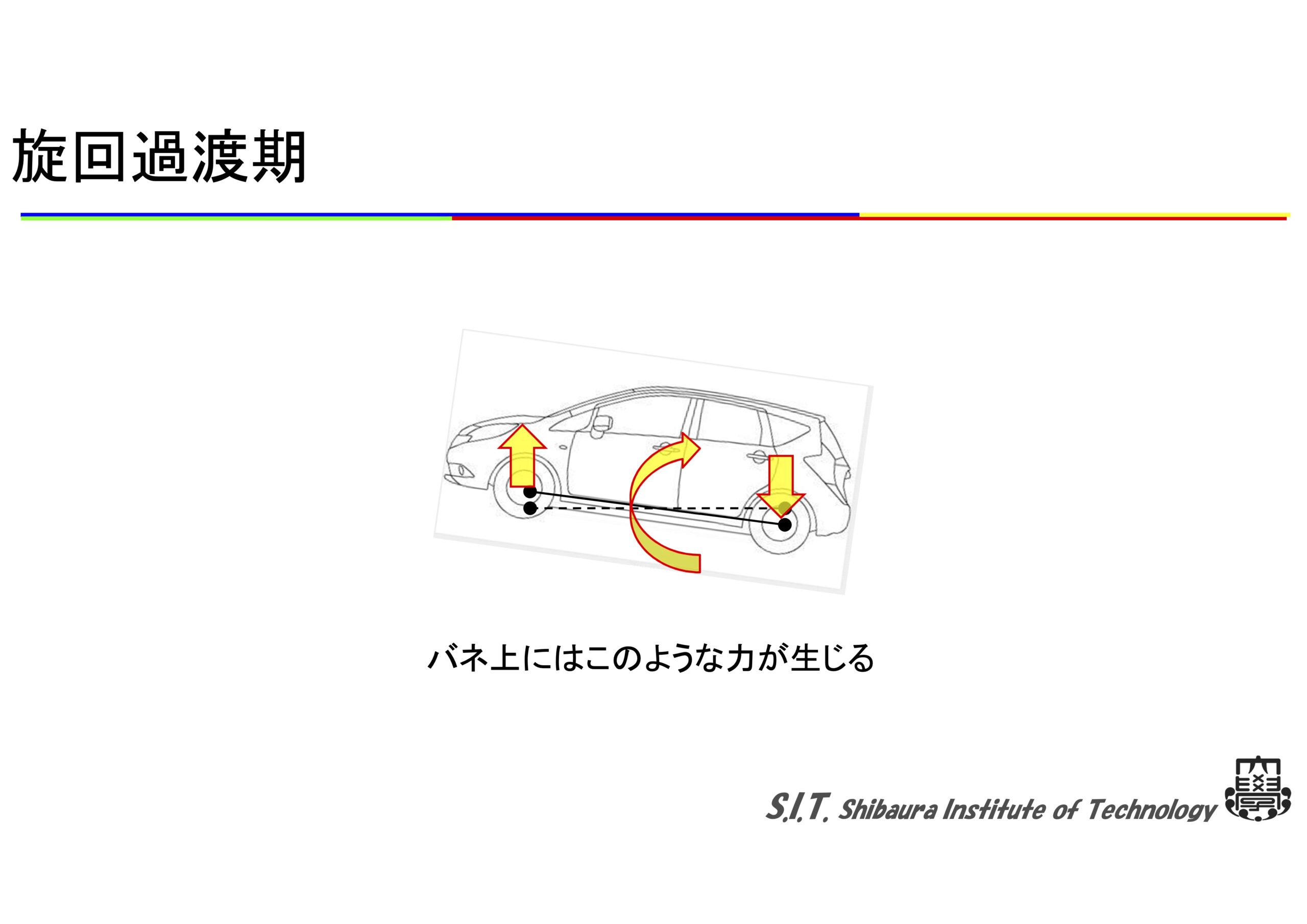
この前上がりのピッチが発生するということは、バネ上の車両(上物)には、前輪には上、車両を持ち上げる力が発生します。車両の後ろ側には、下げる方向の力が生じます。
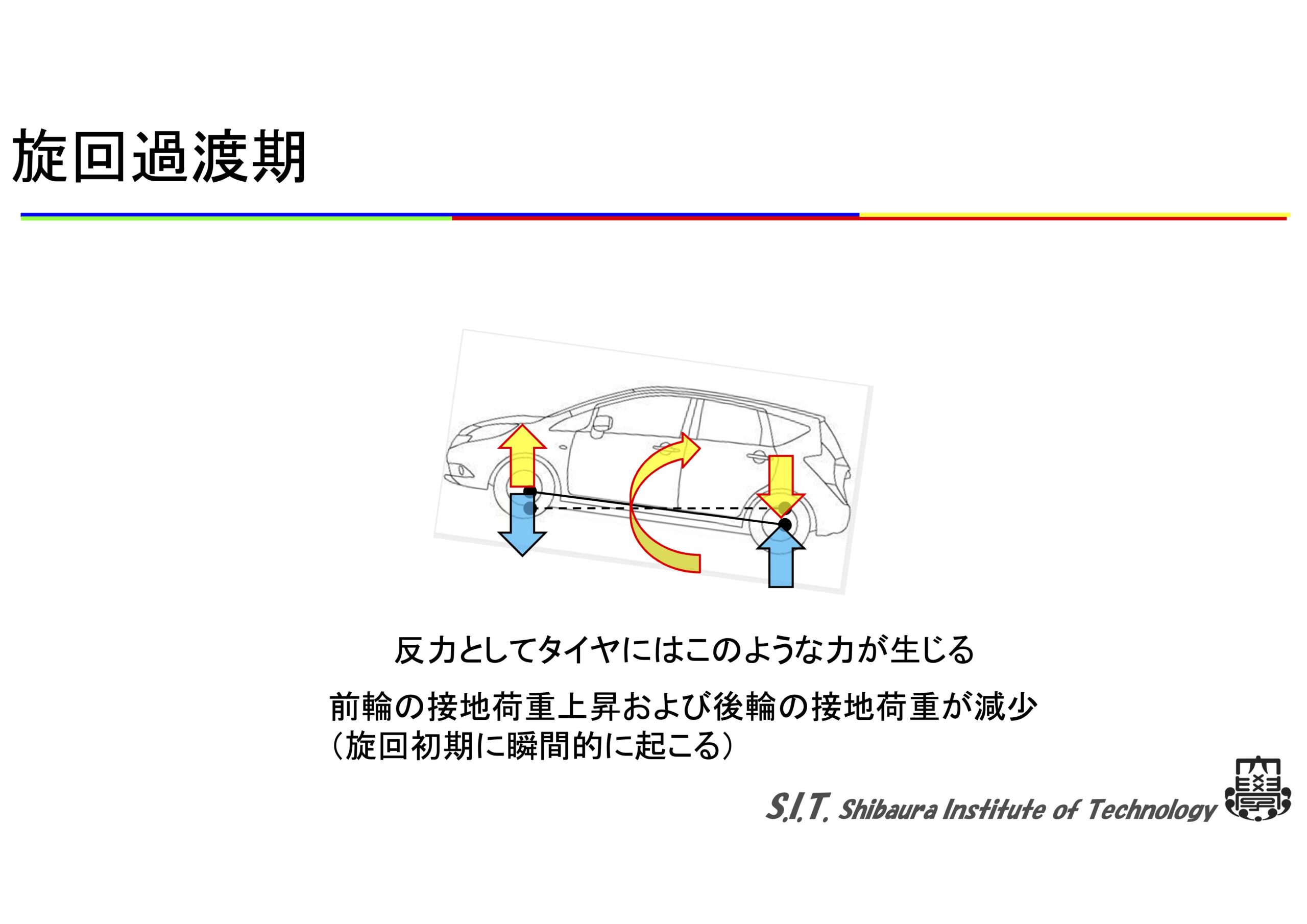
この反力として、タイヤに働く力を見ましょう。
反力として前輪にはより押しつけようとする力、後輪には少し荷重を抜くという力が働きます。これは一瞬起こります。旋回初期の時に瞬間的に。
というところで、ターンインの時はまず前輪が横方向の力を発生させるので、この瞬間だけ発生させてあげれば、ヨーが強くなります。
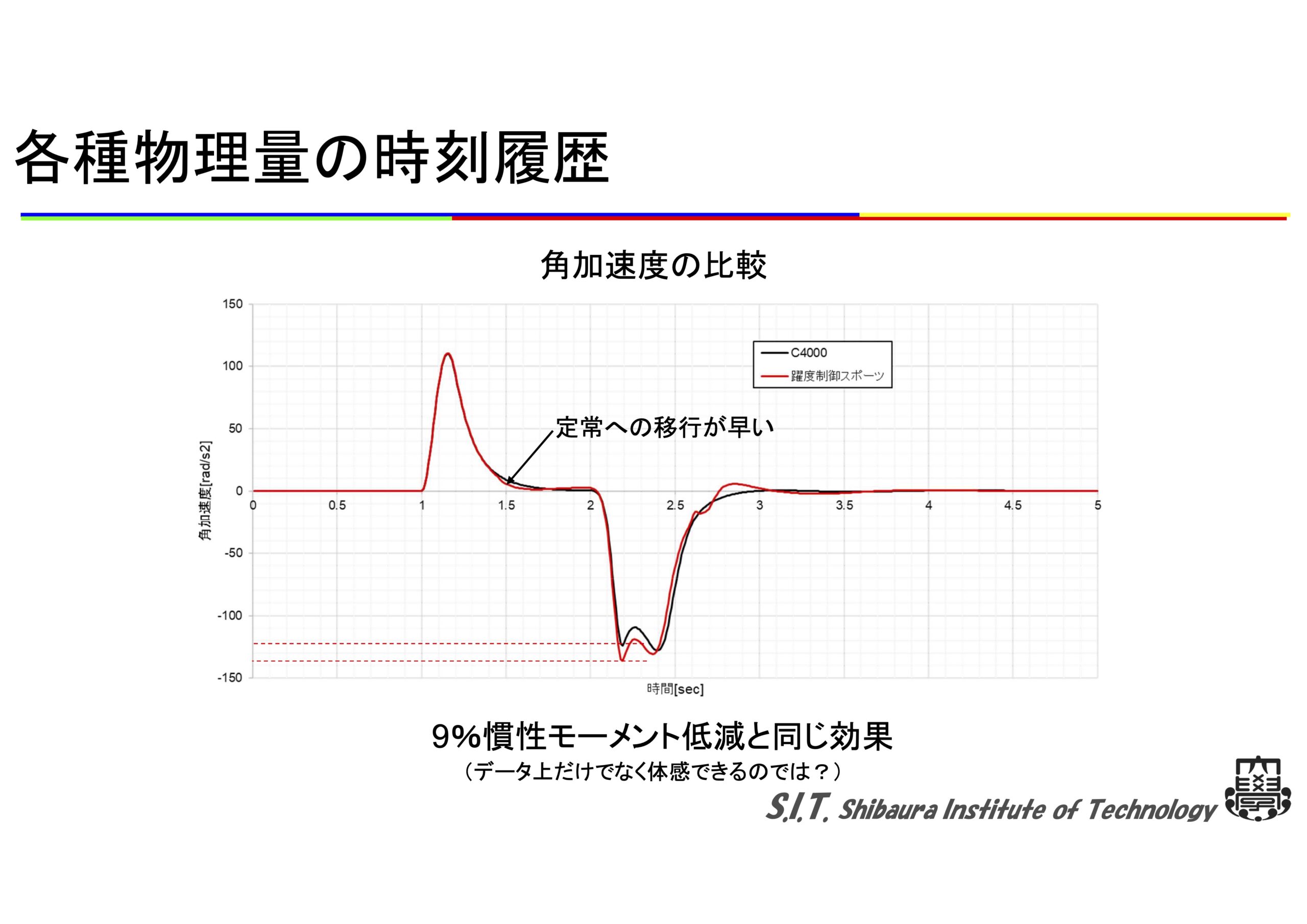
角加速度の比較になります。このスポーツ躍度制御のすごくいいところですが、
まず左旋回のところでパッと立ち上がっての部分はあまり変わらないように見えますが、とにかく収束が早い。定常への移行が早い。
そして切り返しで、明らかに差が出ています、角加速度の差とは、旋回回転させようとする力の加速度なんですが、9パーセントくらい変わってくる。これはヨー慣性モーメントで換算すると約9パーセントの低減と同じ効果がある。
おそらくシミュレーションでこれだけ変わってくれば、体感できるのではないでしょうか?
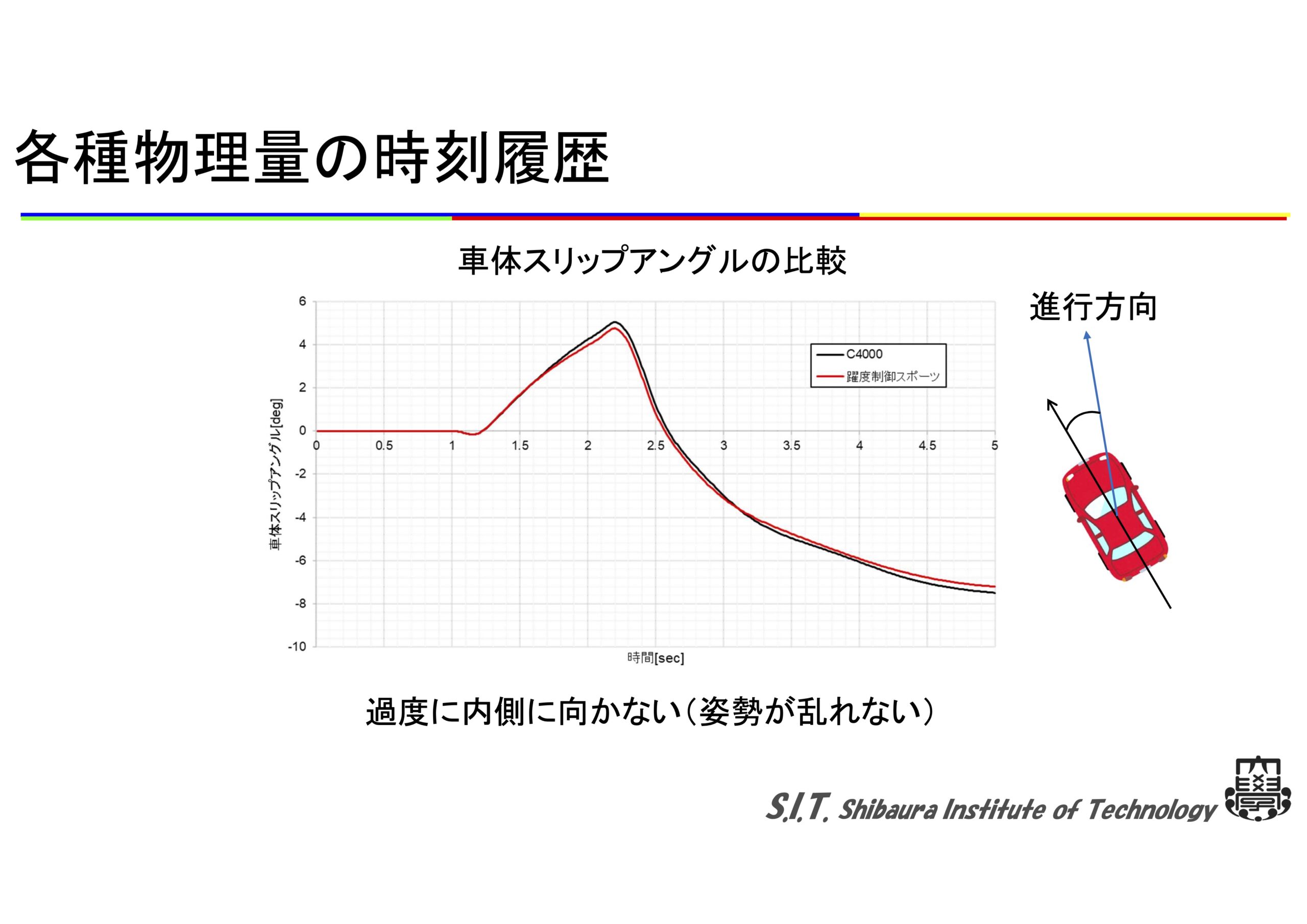
スリップアングルの比較です。車両の進行方向とクルマの向きの差です。
黒線が先に出てきた減衰4000で固定。赤線が制御したものです。
一般的にクルマの旋回速度を上げるほど、スリップアングルはつく傾向です。でも、制御したほうは同じ舵角でもスプップアングルが少ない。にも関わらず旋回軌跡は内側を走れる。過度にクルマの向きは内側を向かない。
姿勢が乱れないにも関わらず、旋回軌跡は内側を走れる。そういういい面が出てきています。
まとめです。
躍度を知ることで、旋回過渡か定常かを知ることができる。これを制御に活用するわけです。
そして躍度による制御で何ができるかというと、過渡のみダンパー制御をすることで乗り心地を犠牲にすることなく、ロール姿勢を制御でき、車両の旋回性能を向上させることができる。
ここでは触れられていないが、加速、減速時のピッチング姿勢も制御できます。
スポーツ性能だけでなく、車両の旋回性能の向上は危険回避などの安全性能にも寄与します。
以上が渡邉教授の説明だった。
新たにEDFC5に搭載された躍度制御に、スポーツドライビングに高い可能性を感じた。
スポーツドライビングにおいて、アマチュアはハンドルを切り遅れる傾向が多い。それで「どうしもてもクリップにつけない」ことが問題になる。タイムアップしたいなら、この制御はとても有効ではないか?
でも、個別に合わせた躍度の調整ってどうなるの? 難しそう?? EDFC5はAIによる自主学習機能が搭載されているというが?
実際の試乗記は後編に続く

■テイン TEL045-810-5501 https://www.tein.co.jp/